RumiCar-C3の製作 回路設計編(Quadcept)
はじめに
今年に入ってから開発を進めていたRumiCar-C3について、今回から少しずつ記事にまとめていこうと思います。
まずは回路設計編です。あと車体設計編と、プログラミング編を書いているところです。
▼ProtoPediaにも書いています。
https://protopedia.net/prototype/5030
基板設計用のCADは、Quadceptを使っています。
▼以前ハッカソンで賞を受賞して、マニュアルとライセンスを頂きました。
TechSeeker Hackathonに参加しました!
はじめに 今回は、TechSeeker Hackathonに参加しましたというお話です。 Hackathon(ハッカソン)とは、HackとMarathonを合わせた造語です。短期間で製作に取り組み、…

▼最近のイベントにて、展示したり発表したりしてきました。
ちょっと振り返り:いろいろ参加しました(展示会、勉強会、学会)
はじめに 今回は最近参加していたイベントの振り返りです。今年に入ってからも、いろいろ参加していました。 私は来年度から四回生になるので、イベントに行くことは…

電子部品の動作確認
主な電子部品は以下の6つです。
- マイコン
- ギヤボックス
- モータドライバー
- サーボモーター
- 距離センサー
- DC/DCコンバータ
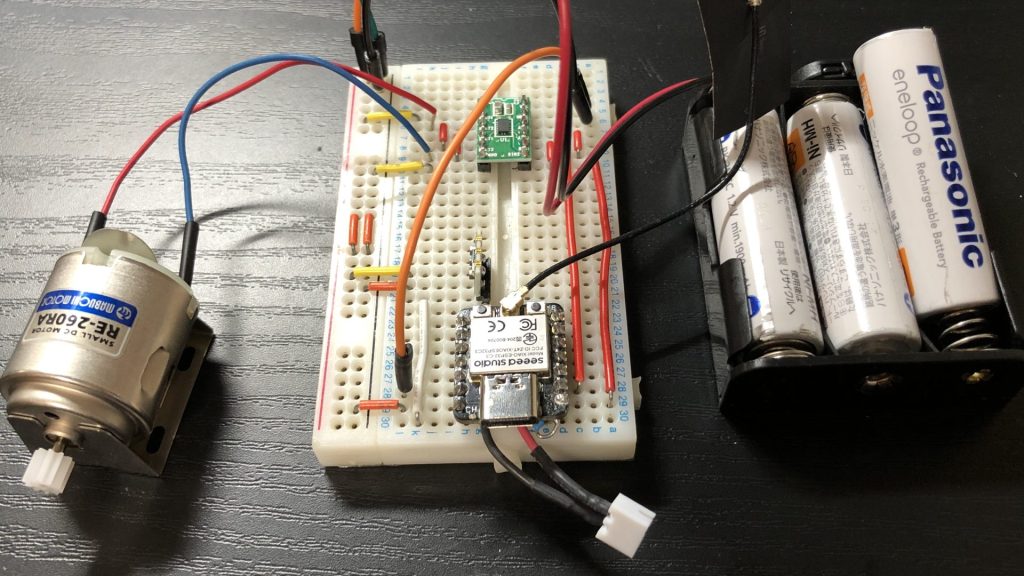
これらを基板にまとめていくわけですが、まずはマイコンとそれぞれの電子部品を一対一で配線して、制御できるかを確認します。ブレッドボードを使っています。
いきなりユニバーサル基板などにハンダ付けすると、ミスが見つかりにくく、やり直しが難しくなるからです。
マイコンはXIAO ESP32C3を愛用しています。RumiCar-C3のC3は、マイコンの名前から取っています。
▼ギヤボックスはTAMIYA製のものを選びました。コミュニティ向けなので、入手しやすく安いものを選んでいます。

▼モータードライバーについてはこちら。DC/DCコンバータも使っています。
モータードライバーを使ってモーターを制御する その2(DRV8835)
はじめに 今回はモータードライバーのDRV8835を使ってみました。普段からよく使っているTB6612FNGとは制御方法が異なります。基板の大きさがこちらのほうが小さいですね…
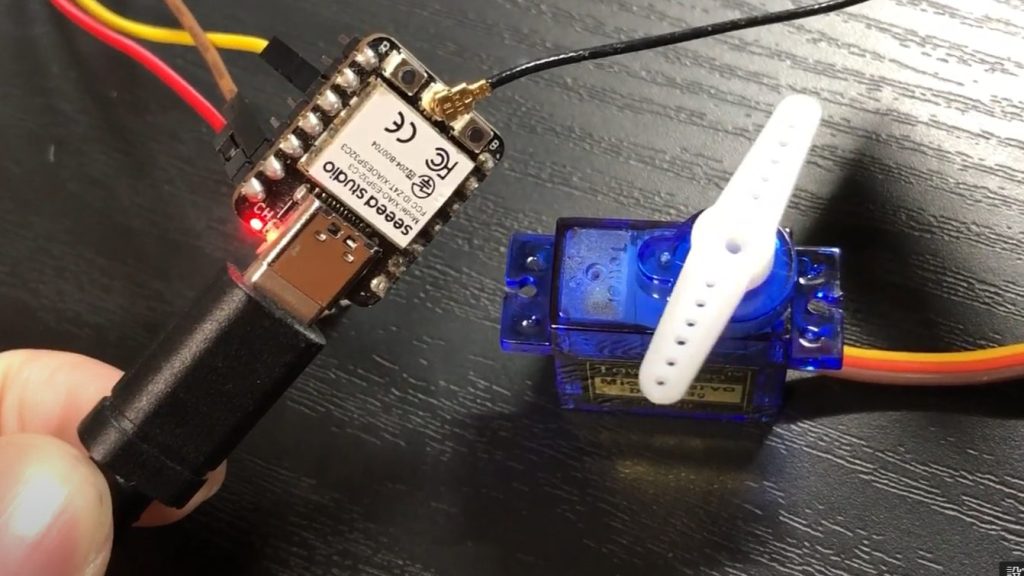
▼サーボモーターについてはこちら。
XIAO ESP32C3を使ってみる その2(analogWrite関数、サーボモーター)
はじめに 今回はXIAO ESP32C3で、analogWrite関数とサーボモーターの制御を試してみました。 サーボモーターについては、既存のライブラリが使えませんでした。そこで…
▼距離センサーについてはこちら。3つ使います。
距離センサーを使ってみる その1(VL53L0X)
はじめに 今回は距離センサーのVL53L0Xを使ってみました。自動運転アルゴリズム開発プラットフォームのRumiCarでも使われていたものです。 ▼RumiCarのリポジトリはこち…

電源は単三電池3本です。DC/DCコンバータは、電池の電圧を5Vまで昇圧して、マイコンに給電するために使っています。
▼秋月電子でいくつかあったので試してみたのですが、XIAO ESP32C3ならどれでも動作していました。
https://akizukidenshi.com/catalog/g/g115775/
https://akizukidenshi.com/catalog/g/g115097/
https://akizukidenshi.com/catalog/g/g113065/
専門では無いので、よく調べてからお使いください。
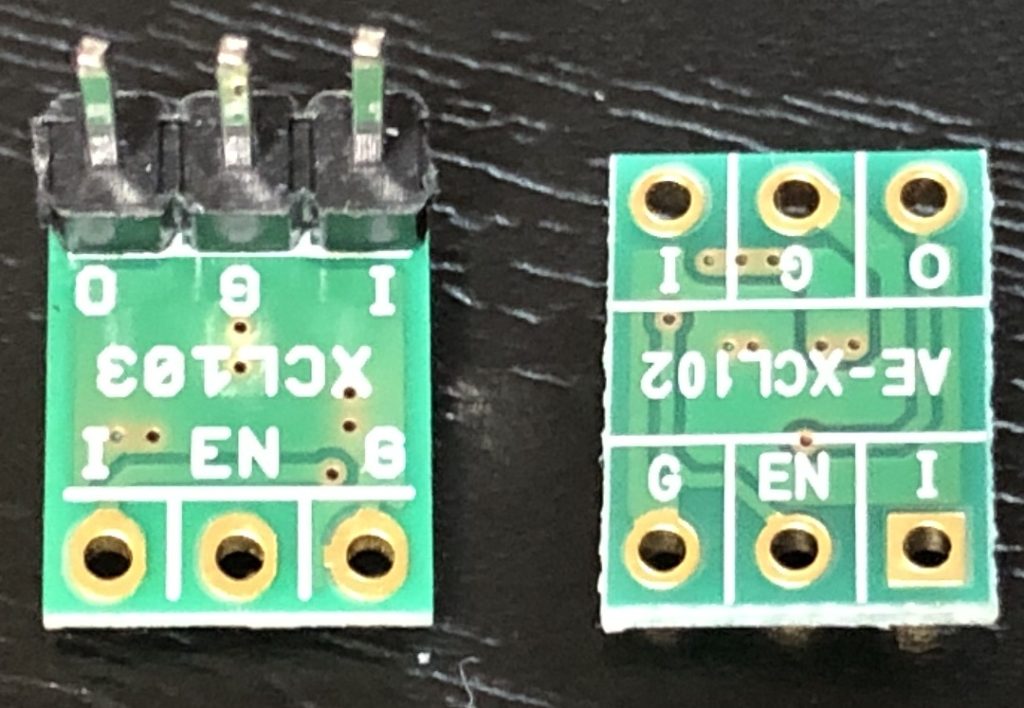
なお、ESP32の開発ボードの場合は、DC/DCコンバータが熱くなって動作しませんでした。電流はそれほど流せないので、ご注意ください。
▼別の種類だと、ピン配置が異なる場合もあります。こちらはINとOUTが逆です。
ユニバーサル基板で配線
動作確認での回路図をもとに、ユニバーサル基板にまとめました。
▼回路図はこちら
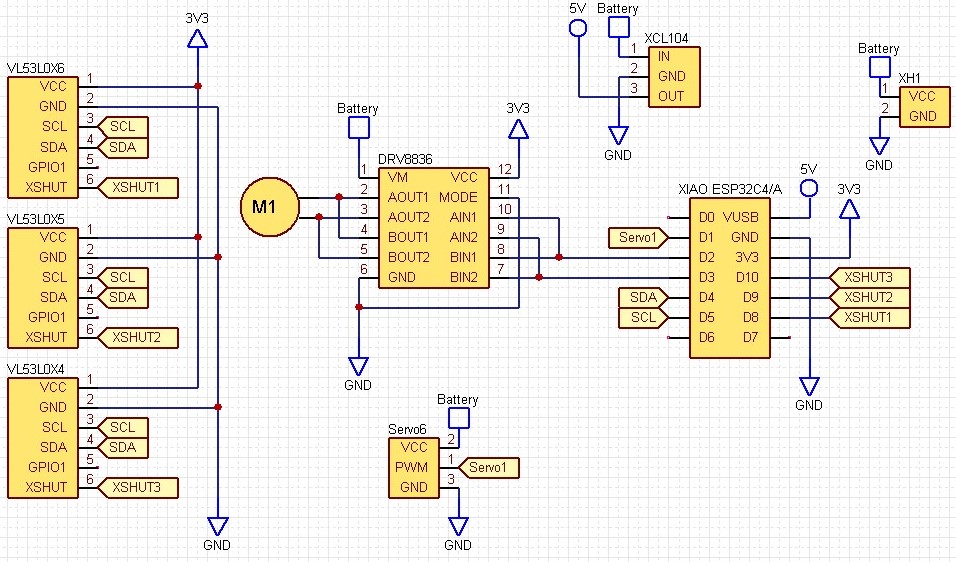
▼ハッカソンで教えてもらった、ポリウレタン線で配線しています。


ユニバーサル基板の外形寸法が60×40mmと小さく、部品を詰め込んでいます。もっと大きなユニバーサル基板で、余裕のある配線をした方が楽ではあります。
配線後は、テスターで導通チェックを行っています。導通するべき場所だけでなく、導通してはいけない場所も入念にチェックしました。
▼いわゆるショートについては、十分にお気を付けください。調べるといろいろ出てきます。
https://startelc.com/elc/elc3_short.html
プリント基板の設計・発注
ユニバーサル基板での配線は大変なので、プリント基板にまとめました。
▼マイコンの余っていた端子には、サーボモーターとフルカラーLEDを割り当てました。
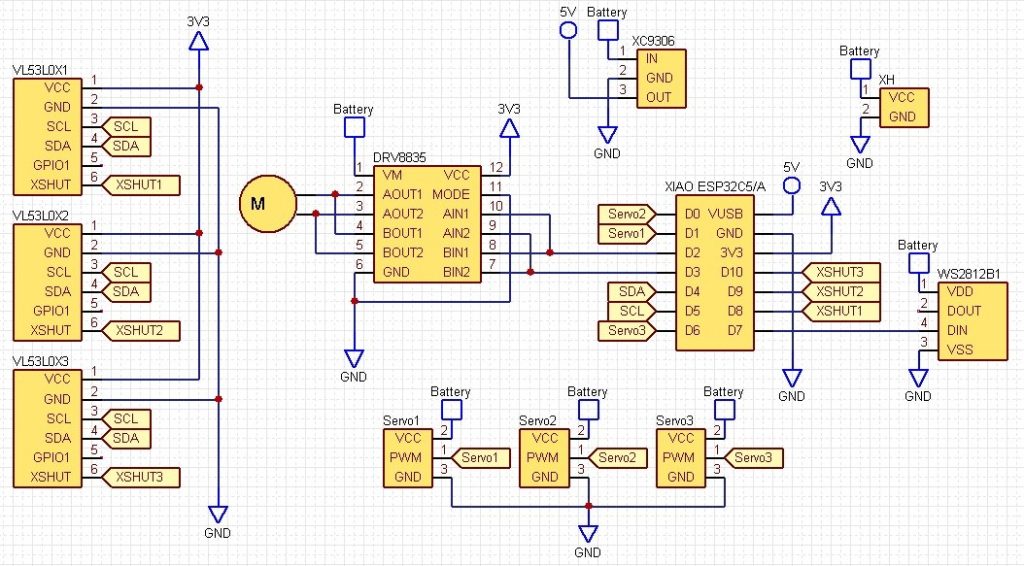
この回路図のデータを元に、プリント基板を設計することになります。
▼プリント基板のデータはこんな感じ。

久しぶりにPCB gogoで基板を発注しました。中国の企業なので、春節の影響を受けるということを初めて知りました。
▼PCB gogoのページはこちら。日本語での対応が丁寧で、びっくりしたことがあります。
▼実際に届いた基板がこちら。


LEDのところにカッターで配線を切った跡があるのですが、若干ミスをしたんですよね...
今までミスなく設計できたことが無いのですが、今回はフルカラーLEDだけで済みました。敗因は、フルカラーLEDのライブラリが無かったので自作したからです...
▼はんだ付け後の基板はこちら。ミスをしていた部分は、ポリウレタン線で再配線しています。


ユニバーサル基板での配線と比べると、かなり楽ですね。
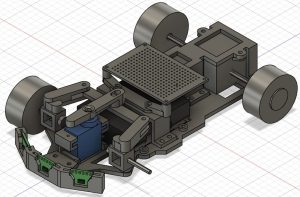
▼車体に取り付けてみました。


基板の取付穴にコネクタやピンソケットが重なってしまって、4つのうち2つは使えないんですよね...
また再設計しようと思います。一応、取付穴を使わずに挟めば固定できる3Dプリンターの部品を作って固定しました。
このあとフルカラーLEDのサンプルプログラムや、動作確認時のプログラムを試してみました。問題なく動作していました。
最後に
プリント基板の設計は、また修正する予定です。マイコンが小型なので、基板も小さく収めたくなります。大きくすればもっと楽に配線できます。
Quadceptのライブラリは、チップ部品だけでなく、モジュール化された電子部品についても欲しいところですね。簡単に作ることができるとはいえ、Pythonとかで一気に作ってしまいたいような気もします。
趣味的ロボット研究所をもっと見る
購読すると最新の投稿がメールで送信されます。