
XIAO ESP32C3を使ってみる その4(WiFi AccessPoint、二輪ロボット)
はじめに
今回はXIAO ESP32C3をWiFiのアクセスポイントにして、ブラウザから操作できるようにしてみました。
そもそもなぜこの機能を試したのかというと、展示会やイベントで使いやすいかなと思ったからです。来場者の方のスマートフォンで接続して操作することができます。会場のWiFiで接続するよりはよっぽど使いやすいでしょう。
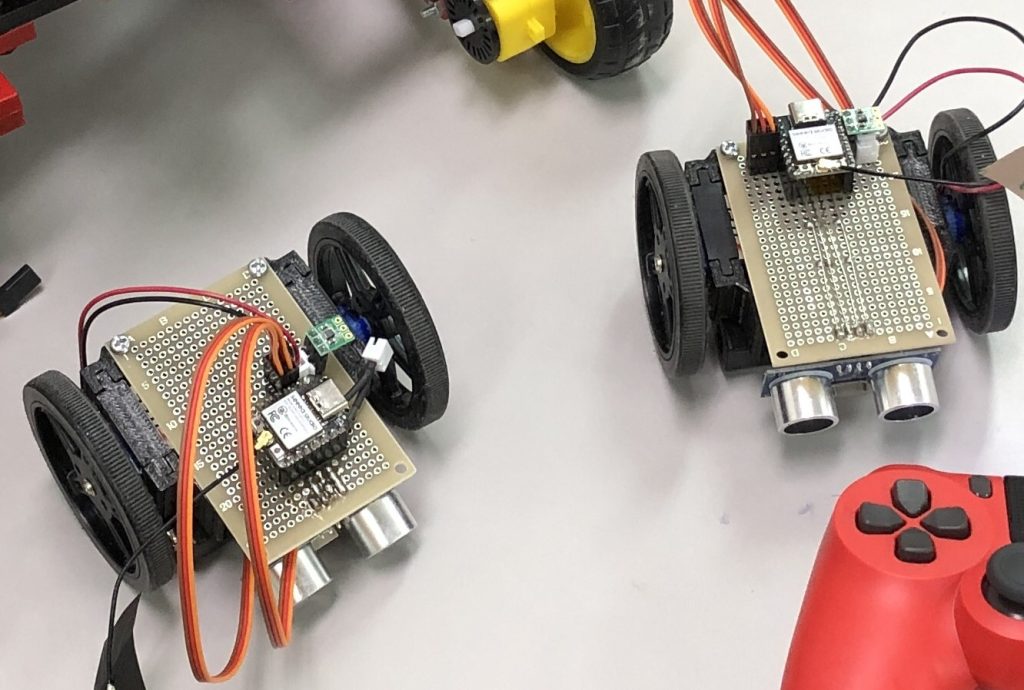
▼実際に小型のロボットを2機作って、ボランティアのイベントに持って行きました。費用は2500円くらいに抑えています。
WiFiのアクセスポイントとして起動する
まずはESP32C3をWiFiのアクセスポイントにして、スマホに接続してみます。
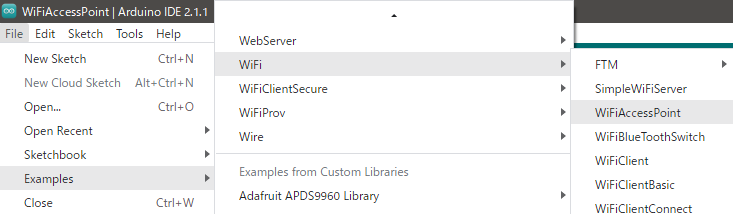
▼Seeed Studioのページに最小限のサンプルがあります。
https://wiki.seeedstudio.com/XIAO_ESP32C3_WiFi_Usage/#use-as-an-access-point
▼プログラムはExamplesのものをベースに作成しました。
サンプルではLEDの点灯をブラウザから操作できるようになっています。
私のプログラムではコメントなどを省いて、シリアルモニタで確認できるようにしました。SSIDはESP32C3、パスワードは123456789にしています。適宜変更してください。
なお、パスワードは短すぎると接続できません。
▼プログラムはこちら
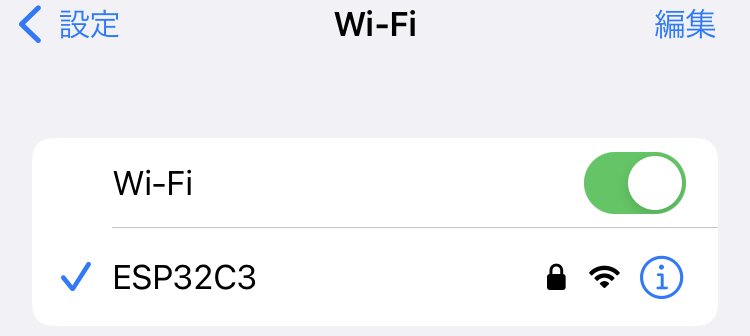
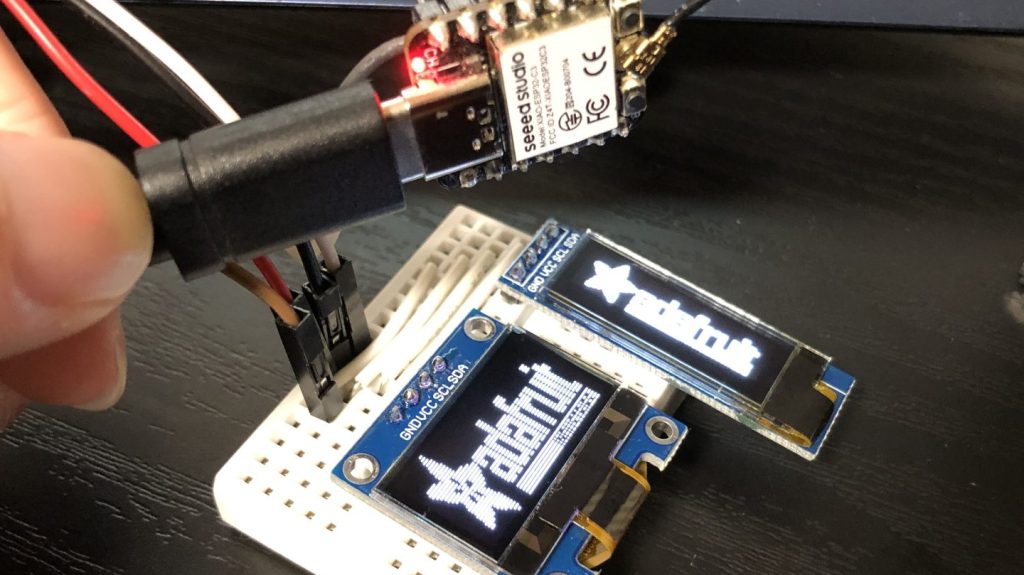
▼プログラムが実行されると、WiFiの接続先にESP32C3が表示されます。
▼接続すると、シリアルモニタにも状態が表示されます。
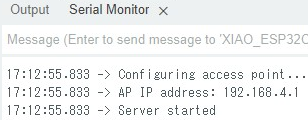
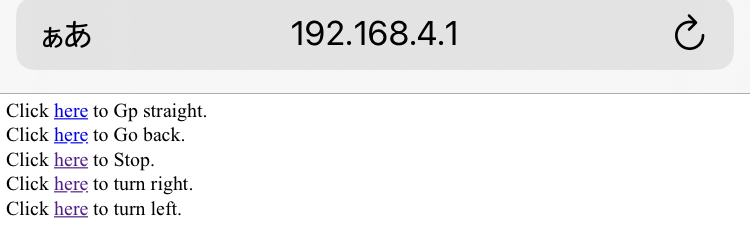
表示されているIPアドレスにブラウザからアクセスします。数字だけ入力するとhttps通信になるかもしれませんが、httpにしてください。
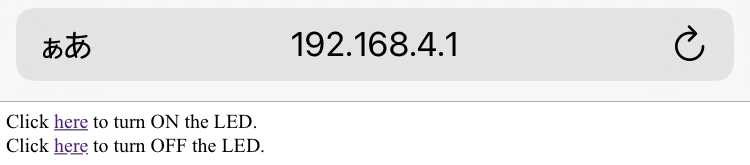
▼ブラウザの画面はこちら。hereがリンクになっています。
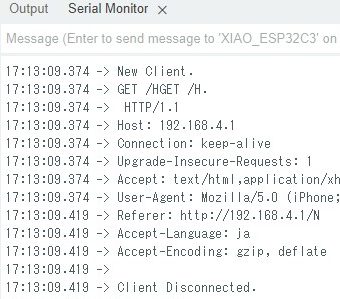
▼リンクを押すと、マイコンでも認識していることが分かります。
小型の二輪ロボットを操作してみる
ハードウェア・ソフトウェアの設計
設計についてここでは詳しく触れませんが、イベント用に小型のロボットを作成しました。
▼こんな感じで設計して、3Dプリンターで作成しました。




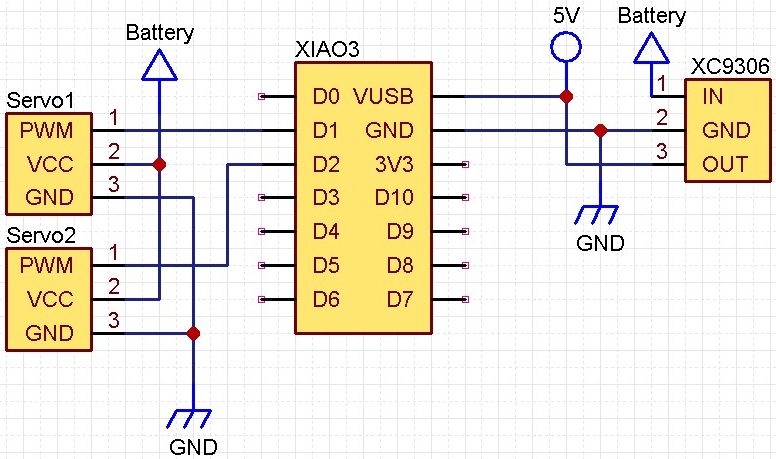
▼回路図はこちら。電源は単三電池3本のみです。マイコンにはDC/DCコンバーターで5Vに昇圧しています。
▼連続回転サーボの制御については、前回の記事をご覧ください。
XIAO ESP32C3を使ってみる その3(OLEDディスプレイ、連続回転サーボ)
はじめに 今回はXIAO ESP32C3で、OLEDディスプレイと連続回転サーボを制御してみました。小型のマイコンには小型のディスプレイを一緒に使いたくなります。 OLEDディ…
▼プログラムはこちら
実際に動かしてみる
プログラムを書き込み、スマホと接続してブラウザからアクセスします。
▼リンクを選択すると、サーボモーターが回転します。UIはあとでちゃんと作ります...
▼リンクを選択した後にURLを見ると、遷移していることが分かります。

▼実際の動作はこちら
最後に
XIAO ESP32C3をWiFiのアクセスポイントにして操作することができました。超音波センサーも動作確認をして、衝突回避の機能を追加したいところです。
HTMLの書き方があまり分かっていないので、勉強してからUIをちゃんと作ろうかなと思います。
実際に大学のボランティアのイベントにロボットを持って行って、子どもたちに操作を体験してもらいました。楽しんでもらえたようです。
▼大勢の子どもたちが来場していました。はにわは不気味と言われました...






