


HOME
趣味で作ったロボットについて紹介しています。
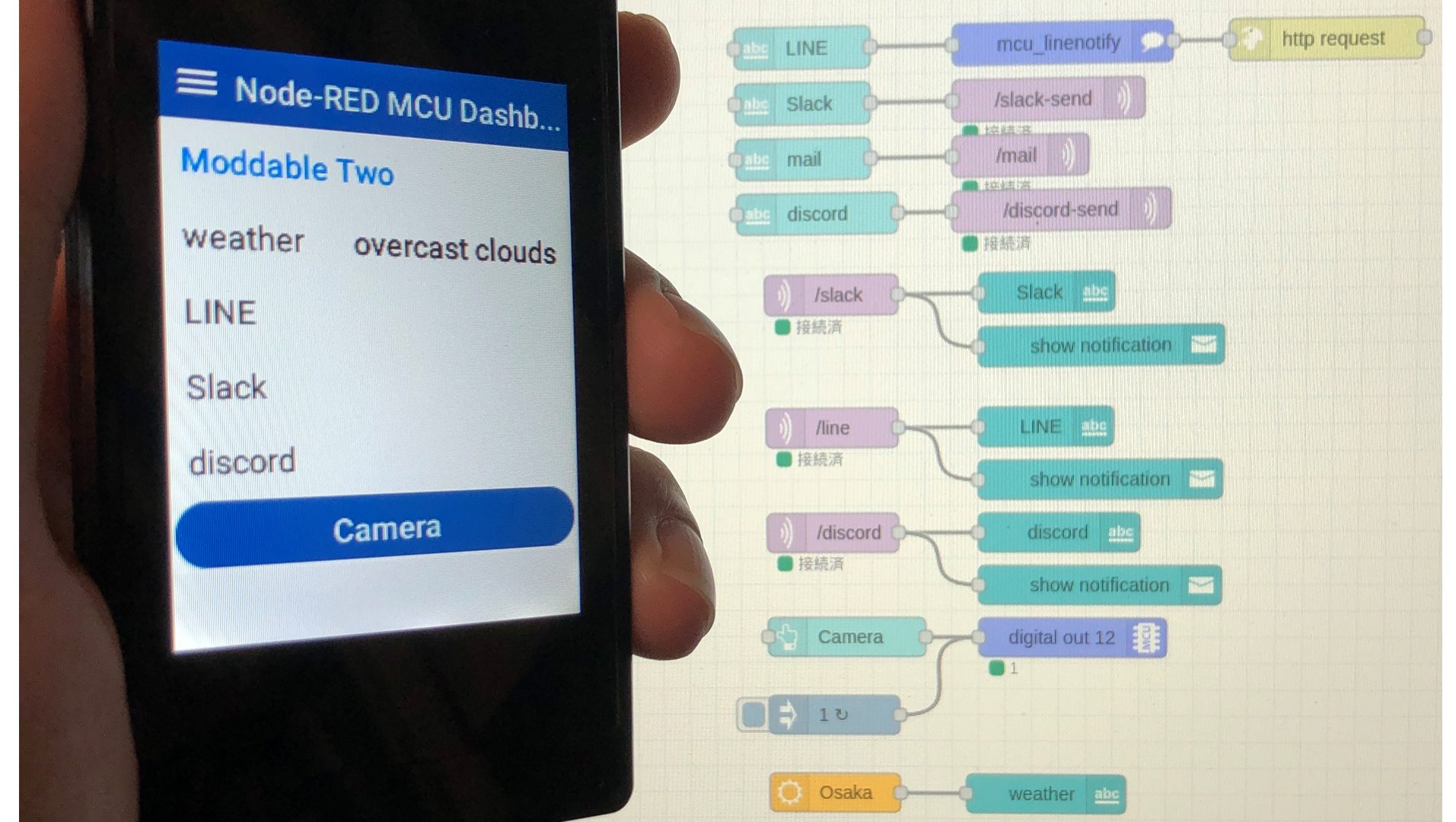
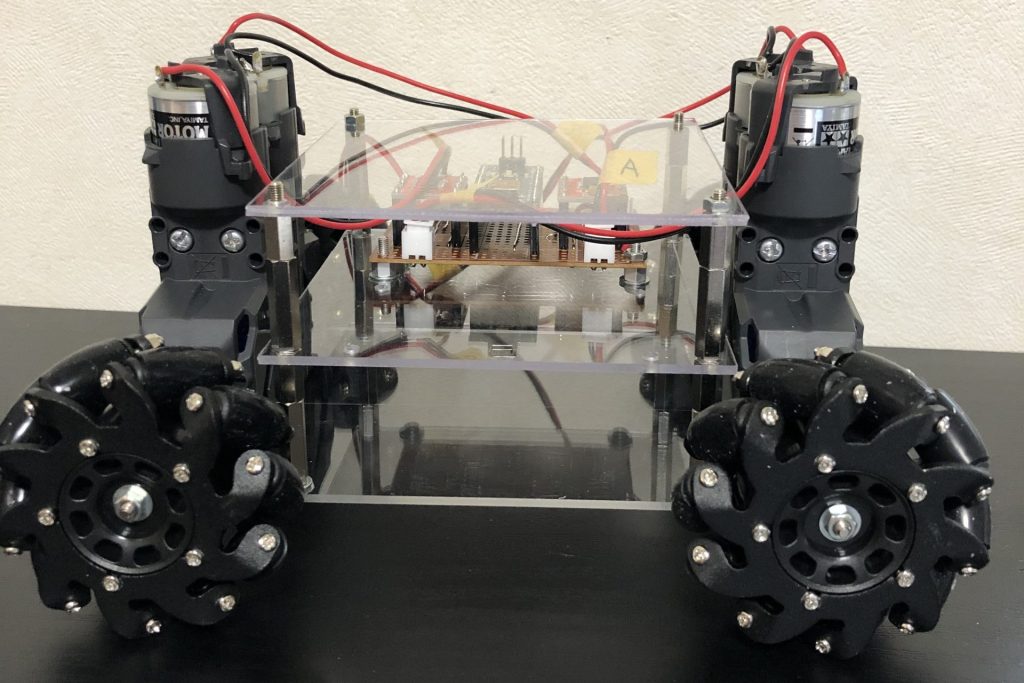
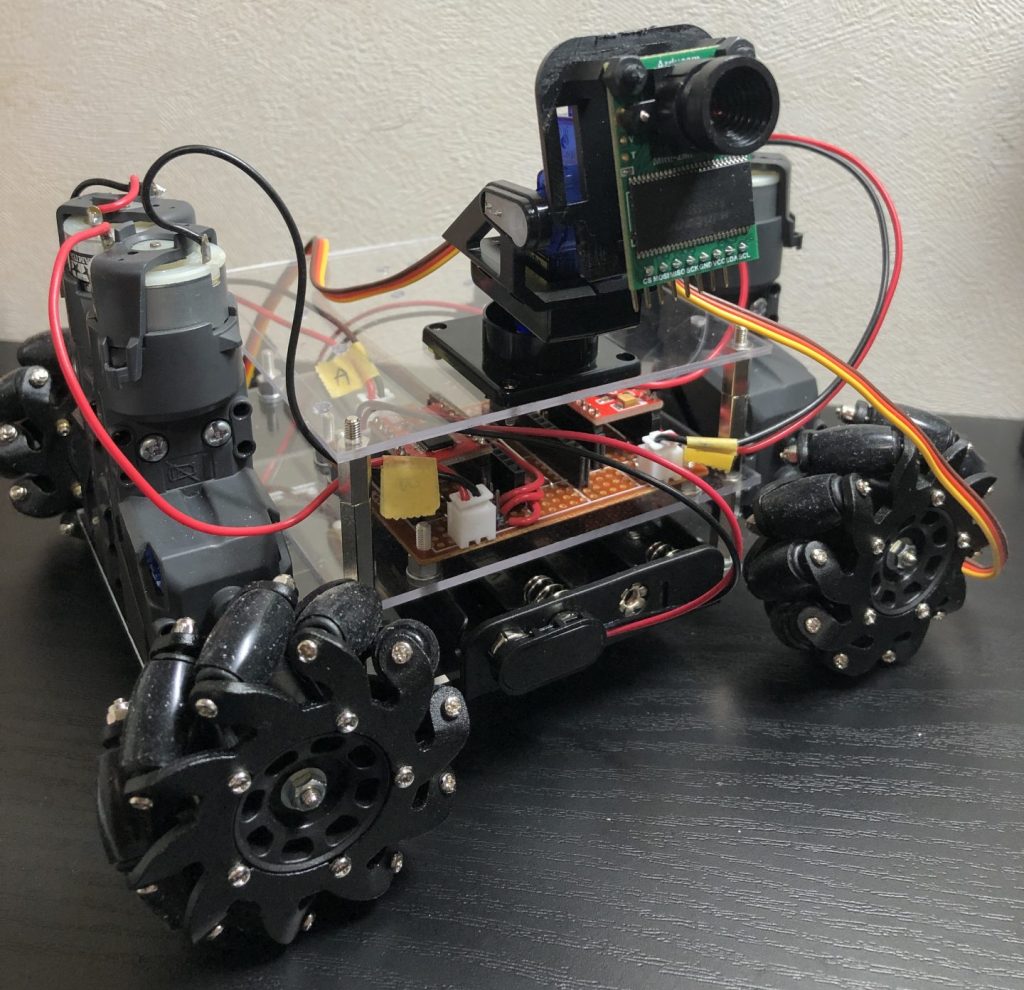
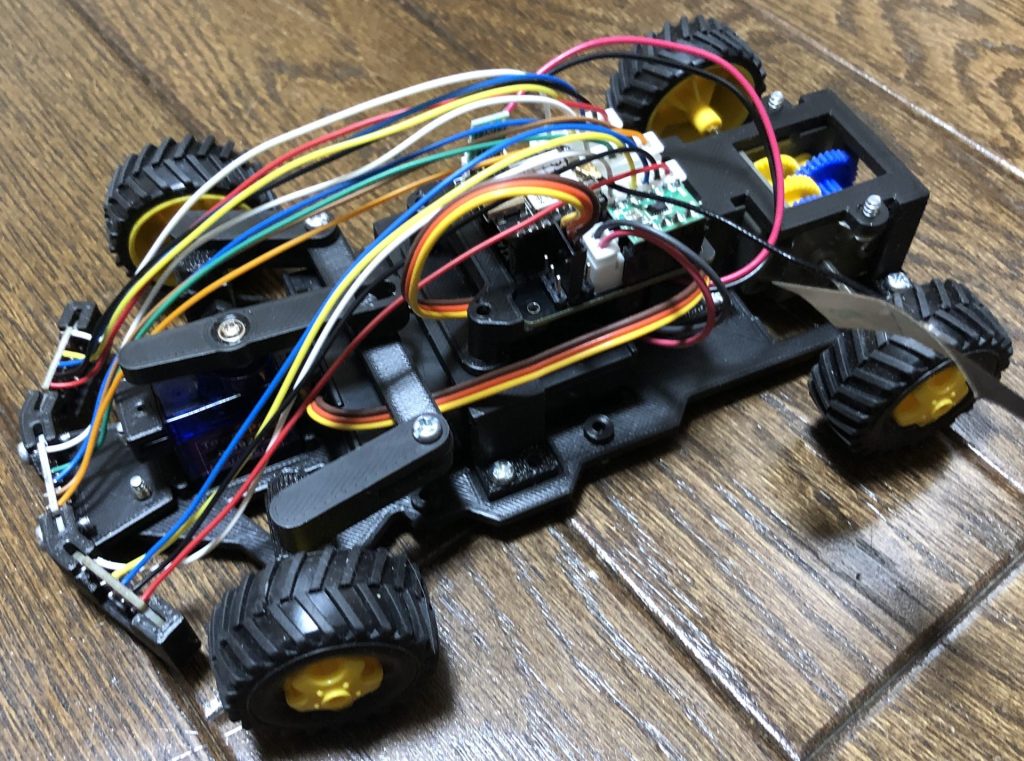
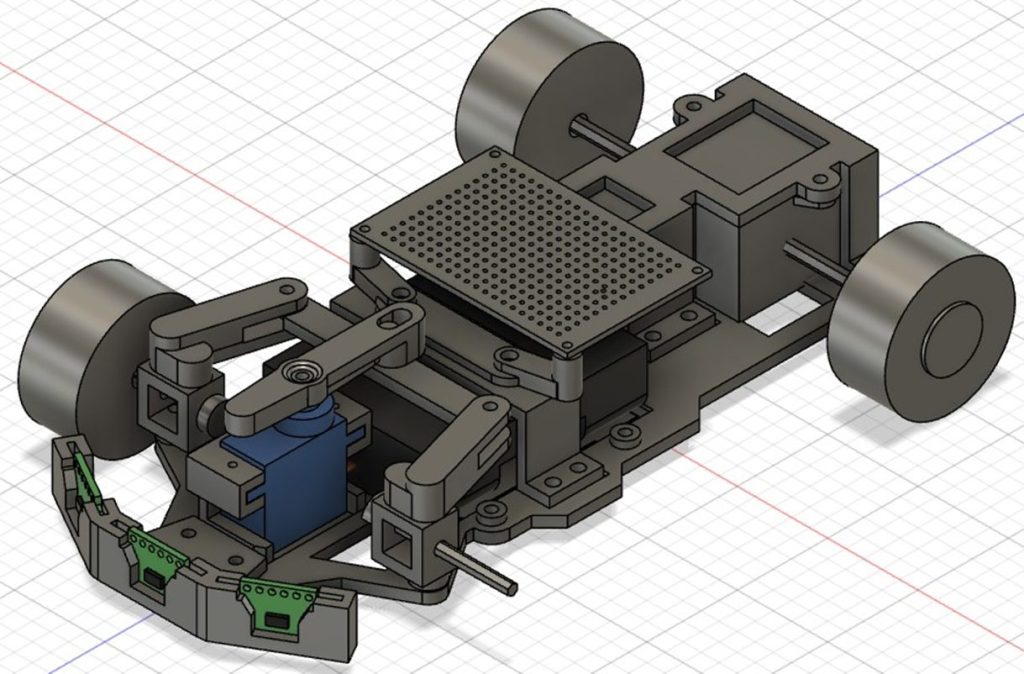
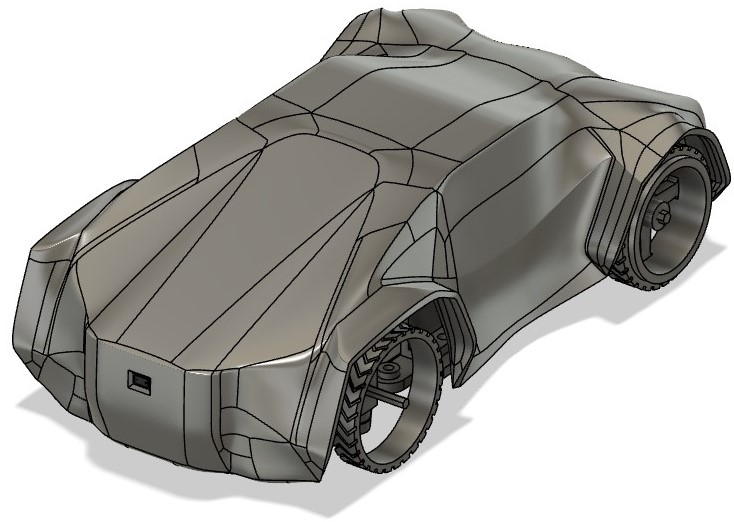
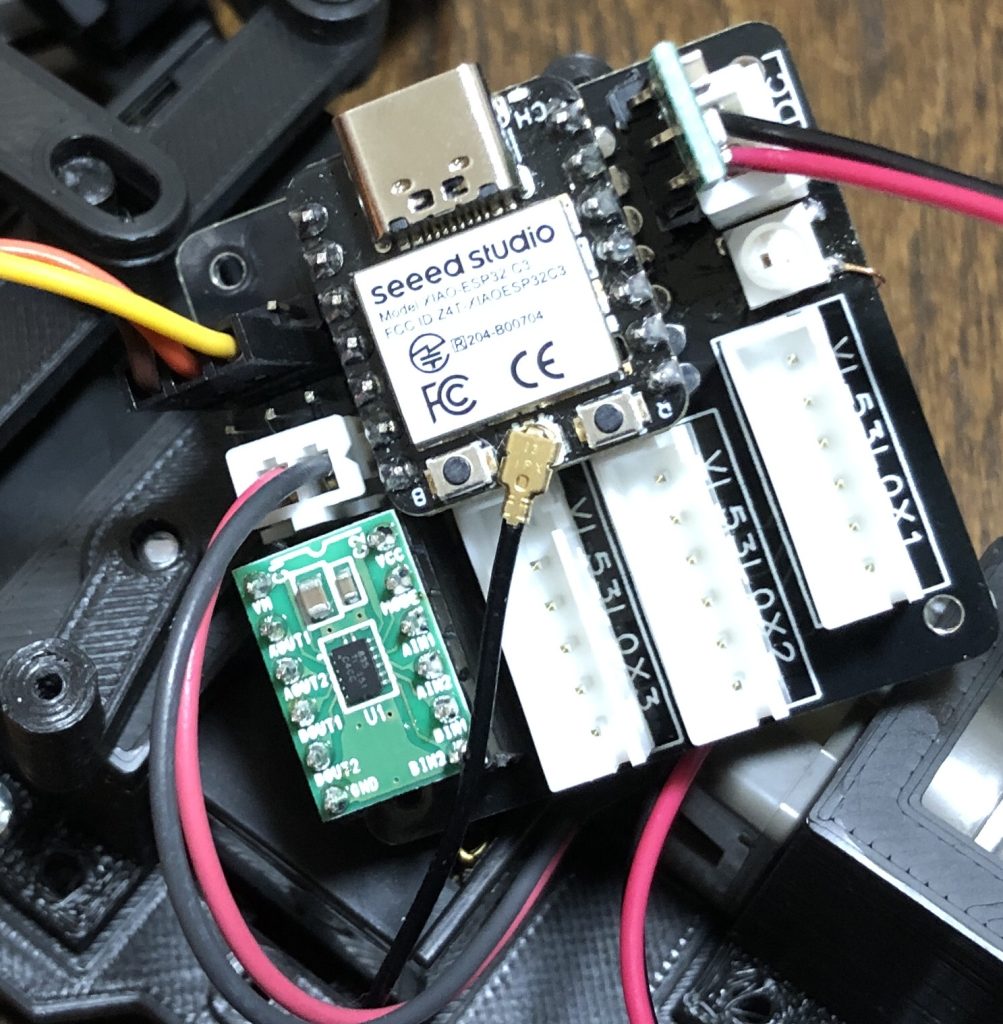
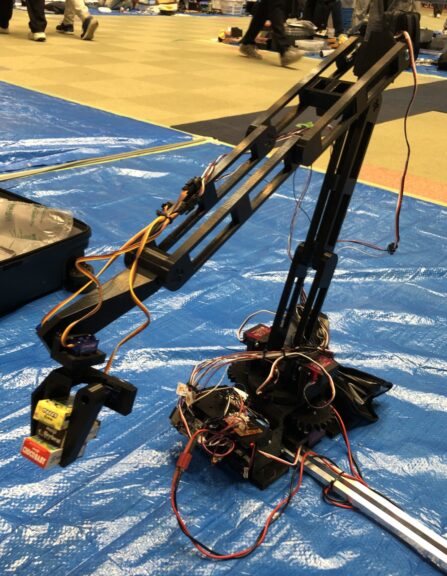
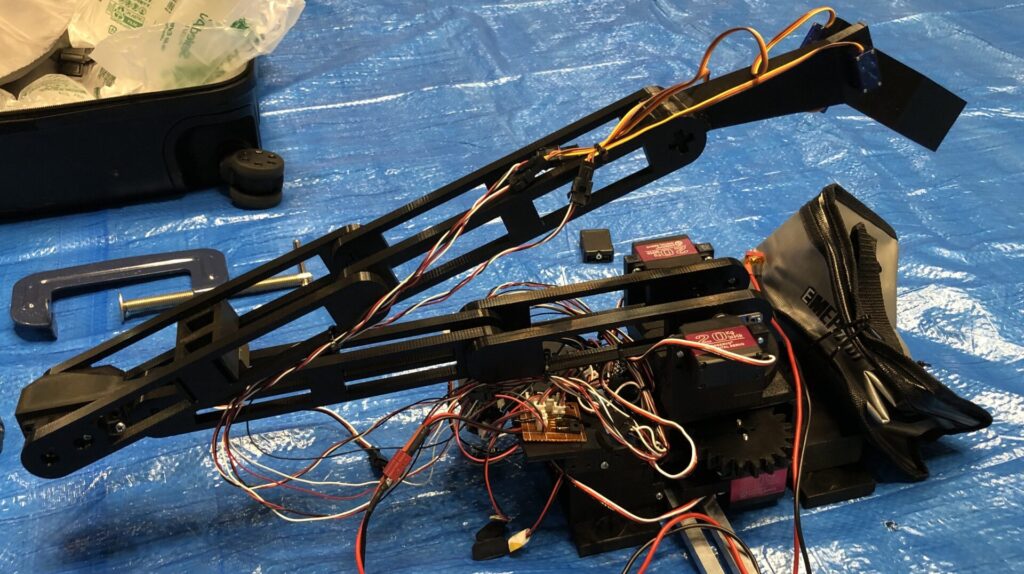
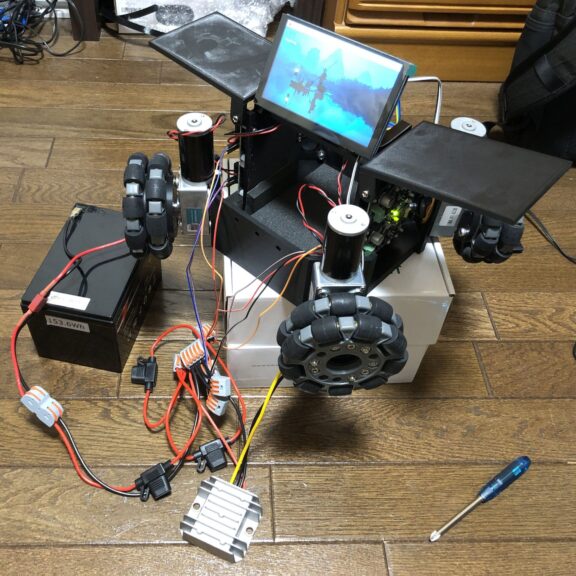
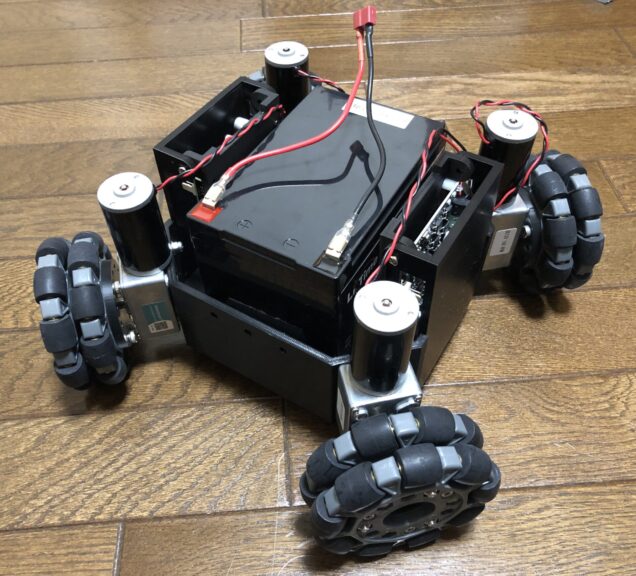
スマホを運ぶロボット

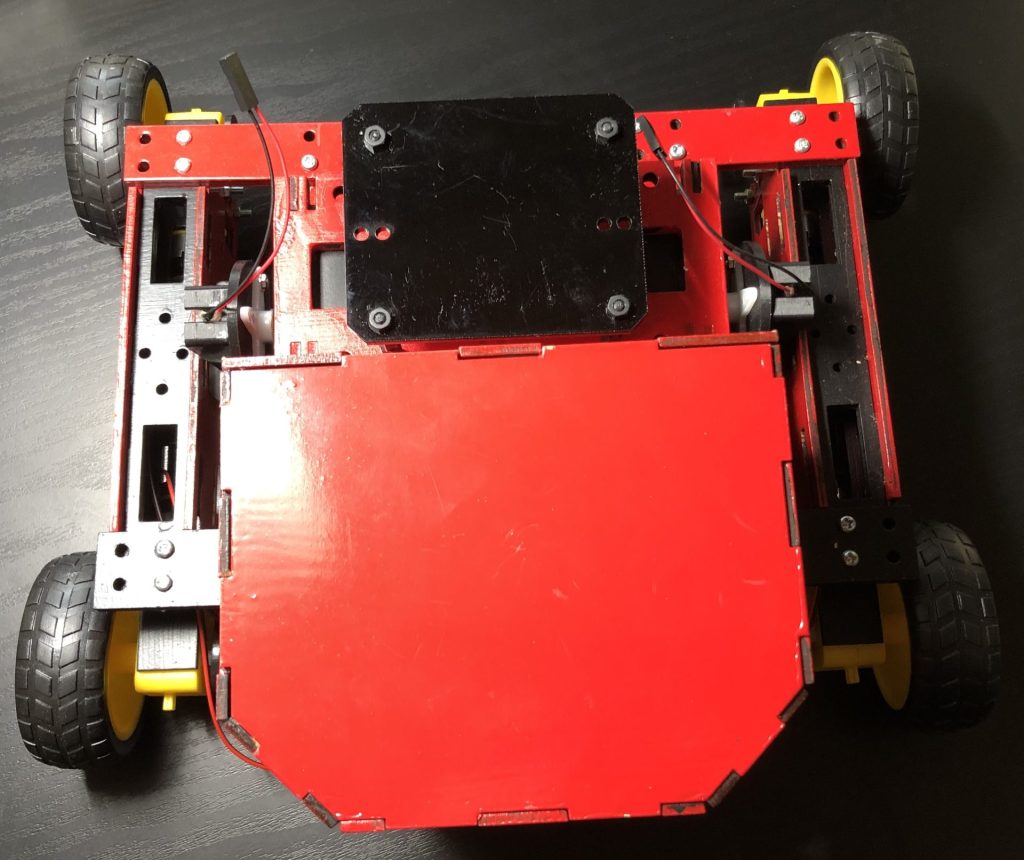


TechSeeker Hackathonにて製作した、スマホを運ぶロボットです。
作品はProtopediaにも投稿しています。


新着情報
- Ollamaを使ってみる その7(Tailscaleを利用したインターネット経由の通信)

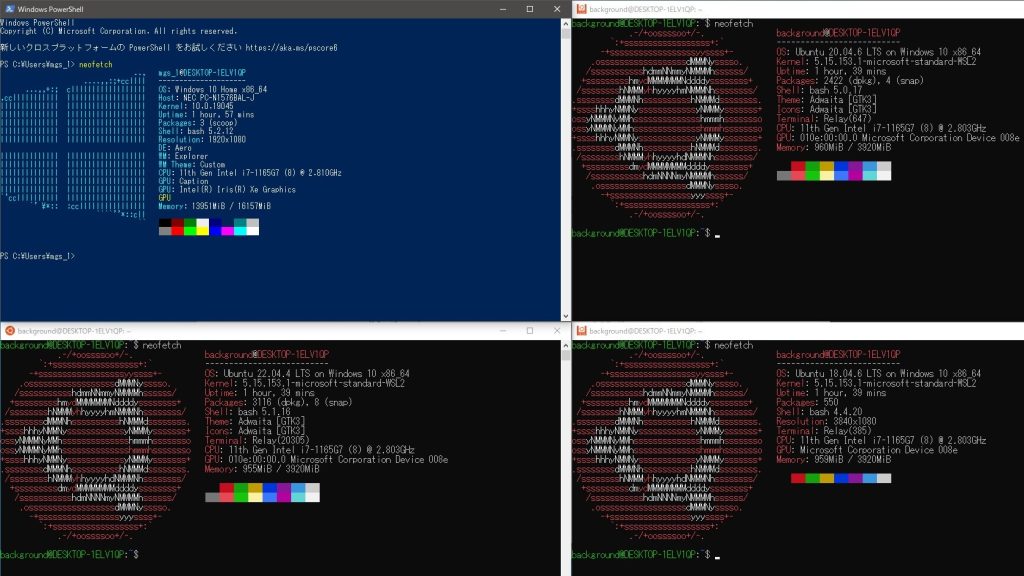
- CTFの勉強 その1(Virtual BoxでのKali Linuxのインストールと環境構築、OpenVPN)

- LM Studioを使ってみる その1(インストール、ローカルLLMとの会話)

- リン酸鉄リチウムイオンバッテリーを使ってみる その2(ミニPCへの電源供給、LiTime 12V12Ah LiFePO4)

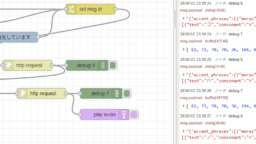
- Node-REDを使ってみる その7(VOICEVOXエンジン、日本語の音声合成)
- NVIDIA Isaac Labを試してみる その1(環境構築、Windows 11)

- ROS2を使ってみる その4(OpenManipulatorのシミュレーション、WSL2 Ubuntu 22.04)

- Node-REDのプラグインを開発してみる その1(LLM Plugin、Ollama、OpenAI)

これまで作ったもの
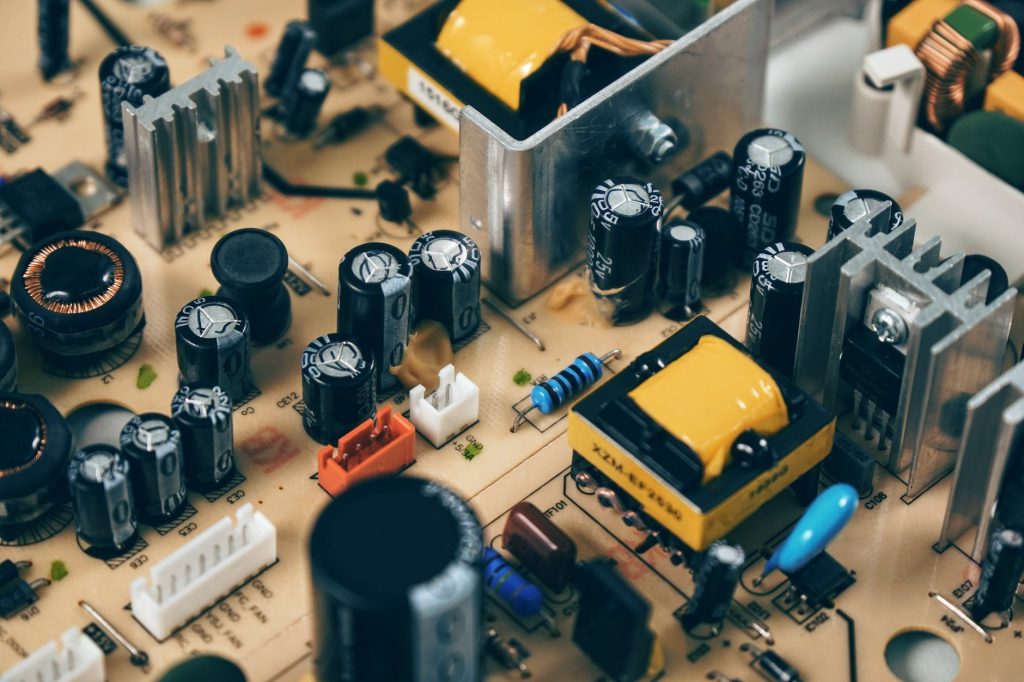
電子工作関連
プログラミング関連
これからプログラミングを学びたい方へ(実行環境、書籍の紹介)
ここでは、これからプログラミングを学びたい方に向けた情報をまとめています。最近はコードを書かないものもありますが、コードを書くものを紹介します。 プログラミ…

Node-RED関連
Unreal Engine関連

ROS関連
3D Gaussian Splatting関連

ノウハウ集
