
プログラミング
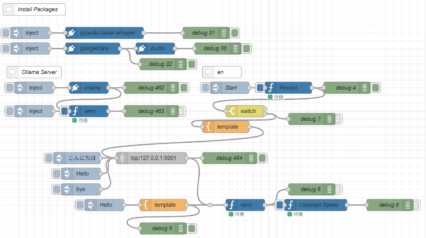
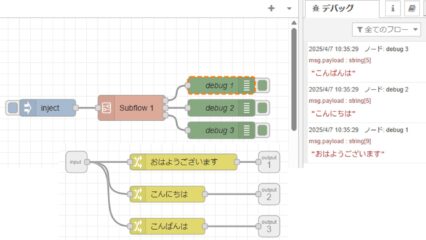
英会話練習のためのプログラムを作成してみる その1(Node-RED、Python)
はじめに つい最近、国際学会に参加することがありました。英語の発表をするだけなら練習すればいいのですが、質疑応答は即座に英語で回答できるか不安だったので、英会話練習のためのプログラムを作成してみました。 これまで試し […]
Node-REDをアプリケーションに組み込む その2(フォルダごとにインストール)
はじめに 今回はNode-REDの環境をフォルダに切り分けてインストールできないか試してみました。 以前の記事ではElectronと組み合わせて試していたのですが、要はExpressで起動しているだけだったので、フォ […]
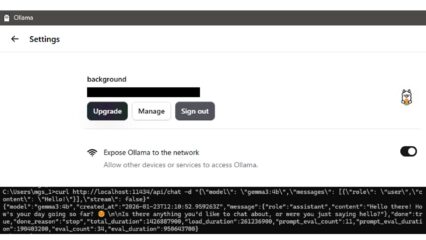
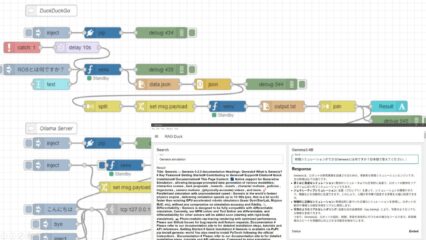
Ollamaを使ってみる その7(Tailscaleを利用したインターネット経由の通信)
はじめに 今回はAPIやVPN接続を利用して、Ollamaを使ってみました。 私が普段使っているノートPCでは大きなLLMだと処理が重いのですが、インターネットを経由して、デスクトップPCのOllamaで処理を行うよ […]
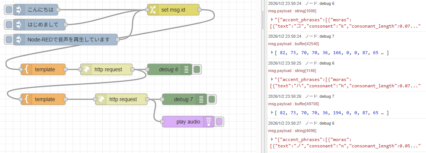
Node-REDを使ってみる その7(VOICEVOXエンジン、日本語の音声合成)
はじめに 今回はNode-REDでVOICEVOXエンジンのAPIを利用してみました。 以前VOICEVOX COREを用いた音声合成については試したことがあります。 ▼こちらの記事で試していました。 VOICEV […]
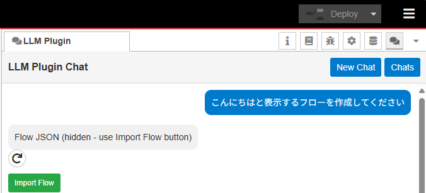
Node-REDのプラグインを開発してみる その1(LLM Plugin、Ollama、OpenAI)
はじめに 今回はNode-REDのプラグインを開発してみました。 Node-REDのプラグインに関する情報が少なすぎて、プラグインと言っていいのか分からないのですが、Node-RED MCUでもプラグインという名前が […]

micro:bitを使ってみる その2(Make Codeでの開発、サーボモータの制御)
はじめに 今回はmicro:bitを使って、サーボモータの制御を試してみました。 まずはサーボモータ1個のブロックでの制御について確認です。数を増やせば、ロボットアームの制御もできるかと思います。 ▼以前の記事はこち […]

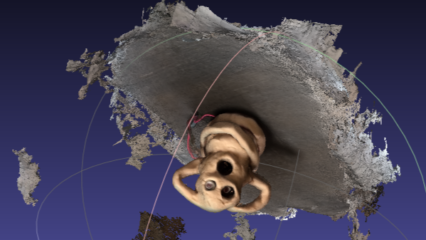
HunyuanWorldを試してみる その1(HunyuanWorld-1.0、環境構築、パノラマ画像の生成)
はじめに 今回はAIで3D空間を生成できるという、HunyuanWorld-1.0を試してみました。 環境構築はできたものの、私のノートPCでは処理が相当重そうだったので、パノラマ画像の生成まで試してみました。3D空 […]
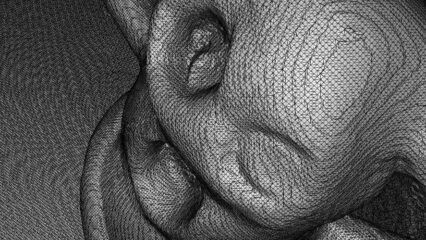
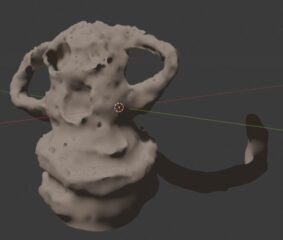
3D Gaussian Splattingを使ってみる その5(GS2Meshの環境構築、WSL2 Ubuntu 22.04)
はじめに 今回は改めてGS2Meshの環境を構築してみました。 これまでの記事でWSL2のUbuntu 22.04を複数インストールできるようにして、CUDAのバージョンも切り替えできるようにしました。これを踏まえて […]
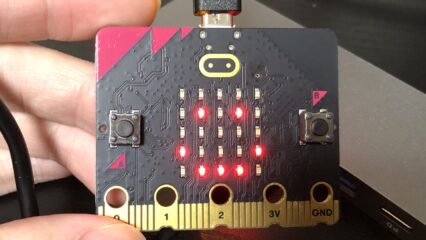
micro:bitを使ってみる その1(Make Codeでの開発、LEDの制御)
はじめに 今回はmicro:bitを使ってみました。 プログラミングを教える機会が何かとあるのですが、最近は学校の授業を通じてScratchに触れている子どもが多いという印象です。教育向けのマイコンで、Scratch […]
3D Gaussian Splattingを使ってみる その3(GS2Meshの環境構築とメッシュモデルの作成、WSL2 Ubuntu 20.04)
はじめに 今回はGS2Meshを用いたメッシュモデルの作成を試してみました。 これまでの記事で試していた3D Gaussian Splatting (3DGS)が利用されています。実際にゲームエンジンや3Dモデルとし […]
Node-REDを使ってみる その6(サブフローの作成)
はじめに 今回はNode-REDのサブフローを作成してみました。 Node-REDのフローをまとめて、一つのノードのように扱うことができます。これまで使ったことは無かったのですが、作成したサブフローをノードとしてパッ […]

3D Gaussian Splattingを使ってみる その2(画像・動画データから3Dモデルの再構築、WSL2 Ubuntu 20.04)
はじめに 今回は画像や動画のデータから、3D Gaussian Splatting(3DGS)で3Dモデルの再構築を試してみました。 以前の記事で実行したときは用意されていたCOLMAPでしたが、今回は私のiPhon […]
3D Gaussian Splatting形式のデータをPythonで変換する
はじめに 今回は3D Gaussian Splatting(3DGS)形式のデータをPythonで変換できるようにしてみました。 ※便宜上3DGS形式と呼称していますが、3DGSは手法で、3DGSにより再構築された3D […]
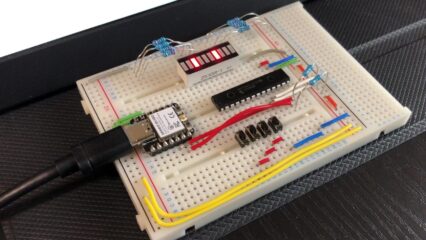
Moddable SDKを使ってみる その1(MCP23017、Moddable SDK 5.12.0)
はじめに 今回はModdable SDKのMCP23017のサンプルを試してみました。 Moddable SDK 5.12.0でMCP23017のアップデートがあり、Node-RED MCUの執筆者メンバーの方がMC […]

MuJoCoを使ってみる その2(Unitree MuJoCo)
はじめに 今回はUnitree MuJoCoのサンプルを試してみました。 最近Unitree関連のロボットを展示会等でもよく見かけます。実機を利用することは難しいですが、せめてシミュレータだけでも動かしたいなと思って […]

3D Gaussian Splattingを使ってみる その1(環境構築、WSL2 Ubuntu 20.04)
はじめに 今回は3D Gaussian Splattingを利用するために、環境構築を行いました。 スマートフォンのアプリとして提供されているScaniverseで3Dスキャンをして3Dモデルを作成していたのですが、 […]
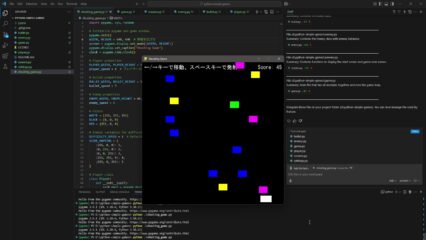
GitHub Copilotを利用する その2(短時間でゲームの生成)
はじめに 今回はGitHub Copilotを利用してゲームを作成してみました。 5か月程前に取り組んでいたことですが、AIハッカソンの前にGitHub Copilotでどれだけ早く開発できるか試していました。今年の […]
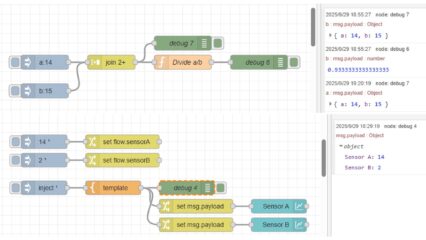
Node-REDを使ってみる その5(センサーなど複数の入力を扱うフローについての考察)
はじめに 今回はNode-REDでのセンサー値の扱いについて知り合いの方から質問を頂いたので、私の実装方法について書きまとめてみました。 各ノードの解説記事はあっても、実際にどのようなフローを作成するかはあまり情報が […]
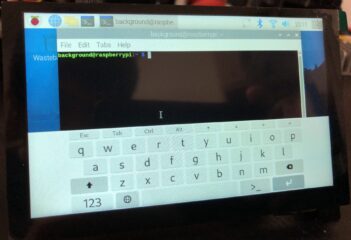
Raspberry Pi 3を使ってみる その1(Freenove 5 inch Touch Screen、Raspberry Pi Connect)
はじめに 今回はRaspberry Pi 3にタッチスクリーンを取り付けて、Raspberry Pi Connectを試してみました。 大阪の共立電子で中古のRaspberry Pi 3が3千円で販売されていて、最近 […]
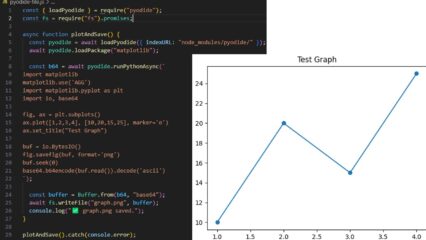
Pyodideを使ってみる その2(Node.jsでの実行)
はじめに 今回はNPMに公開されているPyodideのパッケージを試してみました。 Node.jsで実行できれば、Node-REDでも利用できそうです。 ▼以前の記事はこちら サンプルの実行 NPMのページにサンプ […]

Gymnasiumを使ってみる その1(環境構築、サンプルコードの実行)
はじめに 今回はGymnasiumという、強化学習を行うためのソフトウェアを試してみました。 元々OpenAIのGymというソフトウェアがあるのは知っていたのですが、実行できないことがありました。調べてみると、202 […]
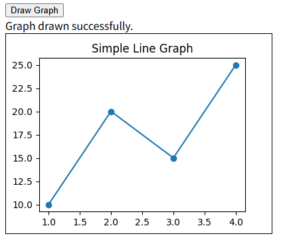
Pyodideを使ってみる その1(ブラウザでのPythonコードの実行)
はじめに 今回はWebブラウザでPythonを実行できる、Pyodideを試してみました。 Pyodideは去年のNode-RED Conの際に、知り合いの方から教えてもらいました。私がNode-RED用に開発したp […]
GitHub Copilotを利用する その1(VS Codeとの連携)
はじめに 今回はGitHub CopilotをVisual Studio Code(VS Code)に導入してみました。 VS Codeで利用すると便利だと教えてもらったので使ってみたのですが、プロジェクトのフォルダ […]
Ollamaを使ってみる その6(ネットでの検索結果との併用、Node-RED)
はじめに 今回は以前試していたPythonによる検索と、ローカルLLMを組み合わせてみました。 LLMが学習していないデータを、ネット上の最新の情報で補うというやり方に、RAG(Retrieval-Augmented […]
Chatbot UI 2.0を使ってみる その1(Windows、Ollama、ローカルでの実行)
はじめに 今回はChatbot UI 2.0を使ってみました。 Chatbot UI 1.0を使ったことは無いのですが、2.0からはファイルのアップロードがサポートされたようです。ローカル環境でChatGPTのような […]
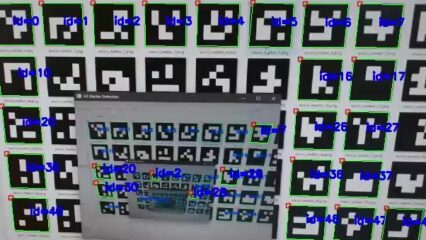
PythonでARマーカーを利用する(OpenCV、ArUco Markers)
はじめに 今回はPythonでARマーカーの生成やカメラでの検出について試してみました。 最近ロボットの自己位置推定にARマーカーを利用しているところを見ました。シミュレーションでもARマーカーを配置して、自己位置推 […]
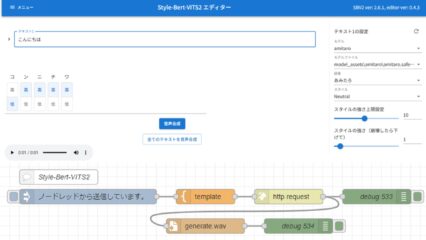
Style-Bert-VITS2を使ってみる(Text to Speech、Node-RED)
はじめに 今回はStyle-Bert-VITS2を使ったText to Speech (TTS)を試してみました。 TTS系のソフトウェアで、日本語に対応していて高速なものを探していたのですが、知り合いの方からSty […]
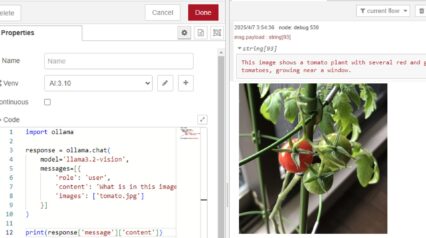
Ollamaを使ってみる その5(画像とテキストのマルチモーダル処理、llama3.2-vision)
はじめに 今回はOllamaでllama3.2-visionを利用して、画像とテキストのマルチモーダル処理を試してみました。 最近GPT4oの画像に対する推論も試したことがあるのですが、ちゃんと認識していて驚きました […]
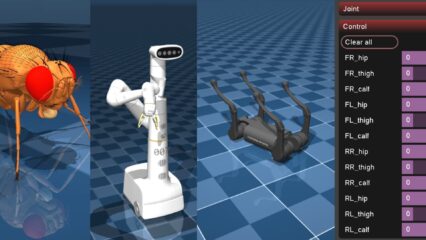
MuJoCoを使ってみる その1(環境構築、サンプルプログラムの実行)
はじめに 今回は物理シミュレーションを行うことができる、MuJoCoというソフトウェアを試してみました。 MuJoCoは以前の記事でGenesisを試していたときに見つけました。Genesisの開発でも利用されている […]

Pythonで画像に対する文字認識 その2(NDLOCR)
はじめに 今回はNDLOCRを利用した画像に対する文字認識を試してみました。 NDLOCRはQiitaの記事で見つけました。国立国会図書館が提供しているライブラリということで、前回試したEasyOCRよりも日本語の認 […]