
小型の二輪ロボットを作る:二号編
はじめに
今回はMaker Faire Kyoto 2023に出展していた二輪ロボットの振り返りです。もう4ヶ月ほど前のイベントですが、夏休みに入って時間ができたのでまとめています。
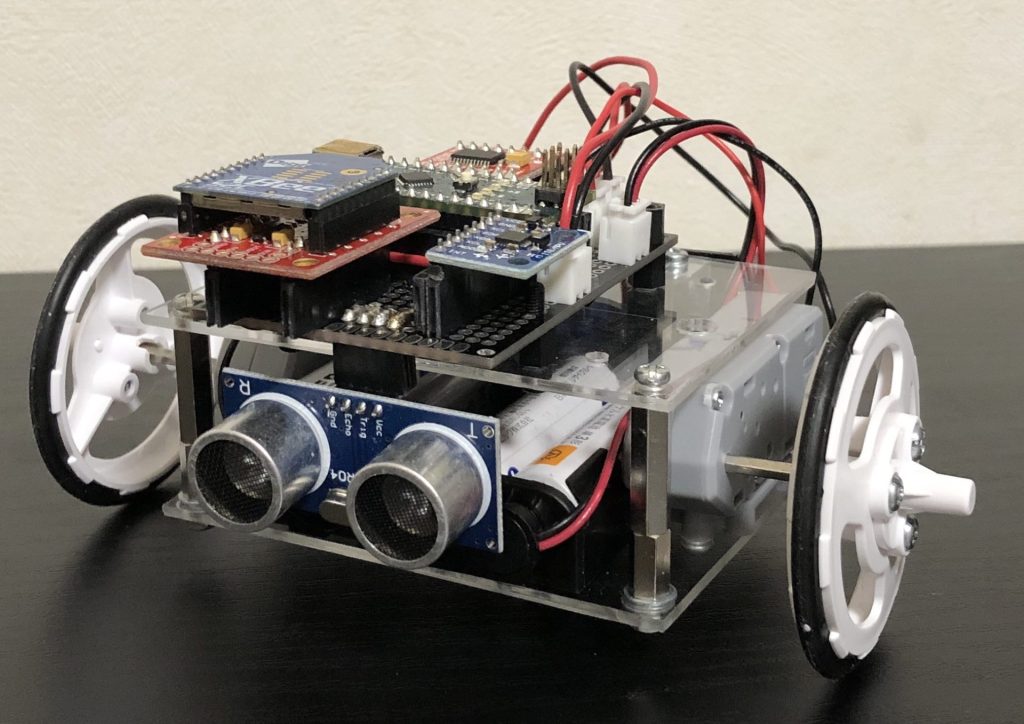
以前も「コマゴマ一号」として二輪ロボットを作りましたが、今回は二号としています。一号とは作り方を変えてみました。新しく身に着けたことが反映されているように感じます。3Dプリンターで出力したり、基板を発注したり、スマホで操作したり...
▼一号はこちら
▼Makerのときの記事はこちら
Maker Faire Kyoto 2023に行ってきました!
はじめに 4月29、30日には「Maker Faire Kyoto 2023」がありました。世界的な展示会です。今回はそのMakerにはじめて行ってきましたというお話です。 私は知り合いの…
筐体を設計する
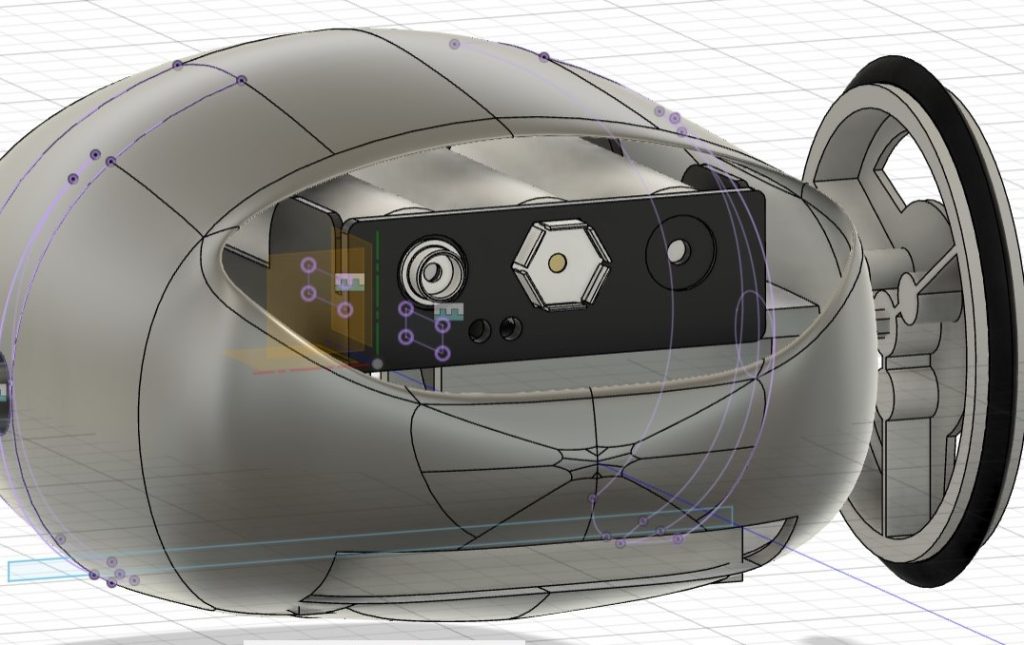
今回はFusion360のフォームモデリングの機能をはじめて使ってみました。
それまでアクリル板を切って作っていたので、四角い形状になりがちでした。せっかく3Dプリンターがあったので、もっと丸くて複雑な形状にしてみたいところです。
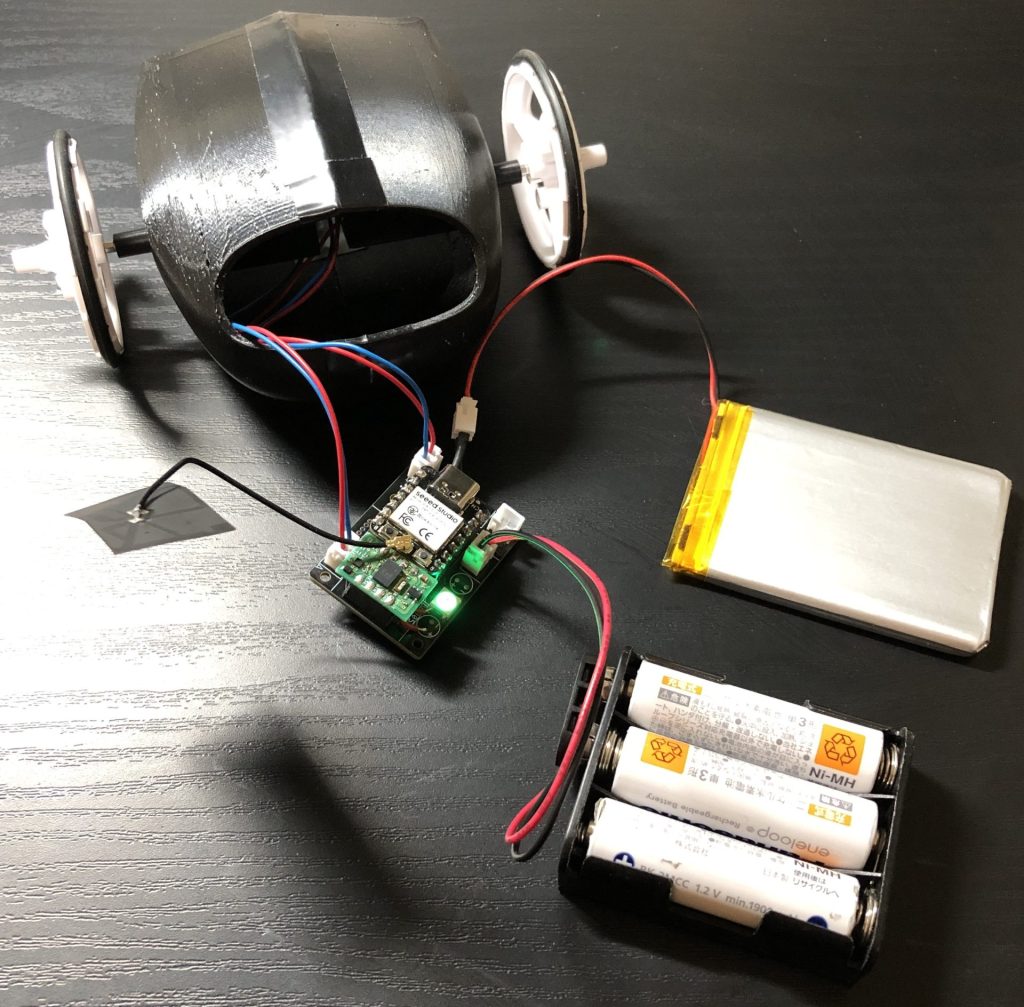
マイコン用のLiPoバッテリーと単三電池×3本が一番大きいです。モーターは小型のものを使っています。
▼使用したモーターはこちら。小型なので、これでも走ります。ギア比が違うかもしれません。
https://akizukidenshi.com/catalog/g/gM-15144/
▼実際の形状はこんな感じ。


▼断面を見て、部品がちゃんと入るかをチェックしています。

▼作成してみると、単三電池を入れる部分が少し小さかったので調整しました。
筐体を半分に割って、3Dプリンターで出力できるようにしています。本当は嵌め合わせるようにしたかったのですが、とりあえずテープで固定しています。
▼実際にできたものがこちら。なんか虫っぽい...


▼基板を引き出すと、内臓が出ているみたいに...
▼Fusion360の履歴を再生する機能で再生してみました。こんな感じで製作しています。
回路を設計する
マイコンはXIAO ESP32C3、モータードライバーにはTB6612FNGを使っています。状態確認用のフルカラーLED、9軸の加速度センサーであるBNO055も搭載しています。
▼回路図はこちら

▼今回は基板の発注もしました。はじめてチップ部品を採用しています。
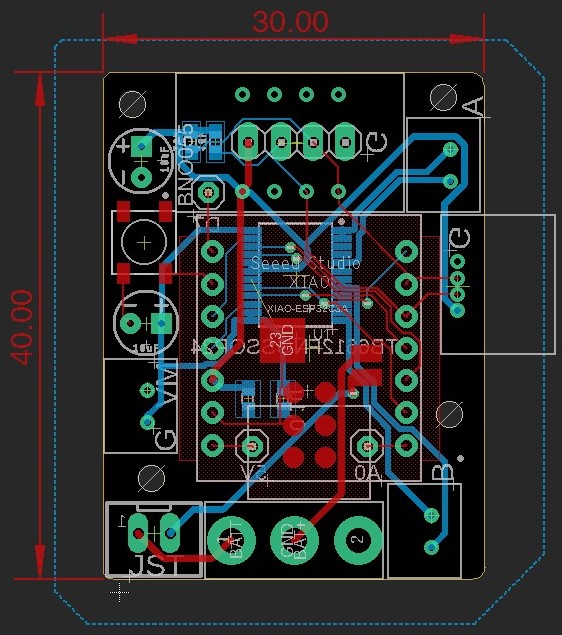
▼実際の基板はこちら。ミスがあったので、配線で何とかしています。


▼TB6612FNGについてはこちら
モータードライバーを使ってモーターを制御する その1(TB6612FNG)
はじめに 今回はデュアルモータードライバーのTB6612FNGを紹介します。これまで小型のロボットに散々使ってきましたが、改めての紹介です。 TAMIYA製品との相性が良く…
プログラムを実行する
以前の記事にも書きましたが、BLE経由でスマホから文字を送って操作します。もっと操作しやすくしたいところです。
▼以前の記事はこちら
XIAO ESP32C3を使ってみる その1(バッテリー、Bluetooth)
はじめに 前回の記事はMaker Faire Kyoto 2023での展示のお話でした。今回は展示品に使っていたマイコンであるXIAO ESP32C3のお話です。MakerではiPhoneと無線通信をし…

▼プログラムはこちら
▼実際の動作はこちら
最後に
Maker Faire Kyoto 2023に向けて短期間で製作したので、いろいろと改良したいところがあります。展示していると、虫っぽいという人と、未来の車っぽいという人がいました。
今作ると、また新しい形になりそうです。そろそろ自分用に購入した3Dプリンターが届くころなので、試してみたいところです。

