
WSL

ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
はじめに 最近WSL2でUbuntu環境を複数インストールできるようになったので、ROS2の環境を改めて構築してみました。 大学の研究でロボットの遠隔操作にも取り組み始めているのですが、通信周りを改善させるにはROS […]

WordPressを使ってみる その1(WSL2 Ubuntu 22.04環境へのインストール)
はじめに 今回はWordPressをWSL2 Ubuntu 22.04環境にインストールしてみました。 このサイトは3年半ほどWordPressで運営しているのですが、書籍に従って設定していたというのもあり、そろそろ […]
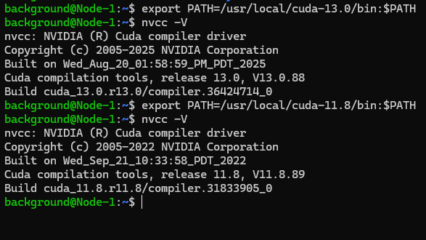
複数のCUDAのバージョンを切り替える(WSL2 Ubuntu 22.04)
はじめに 今回はWSL2 Ubuntu 22.04の環境で、CUDAのバージョンの切り替えについて試してみました。 以前3D Gaussian Splatting (3DGS) の環境を構築するために、元々入っていた […]

Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
はじめに 今回はUnityにROS#をインストールし、ROSでPublishされているカメラ映像をSubscribeできるようにしてみました。 ロボットの遠隔操作をするときに用いようと思っています。通信のラグなどが気 […]
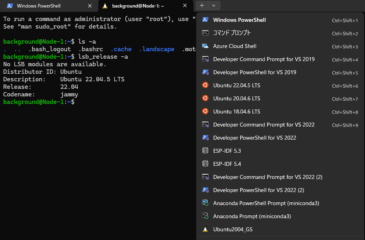
WSL2を使ってみる その5(同じバージョンのディストリビューションを複数インストール、Ubuntu 22.04)
はじめに 今回はWSL2で同じバージョンのUbuntu環境をもう一つインストールしました。 元々インストールしていたWSL2のUbuntu 22.04の環境を壊したくなかったので、別でインストールする方法を探していま […]
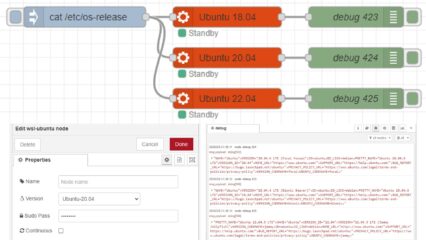
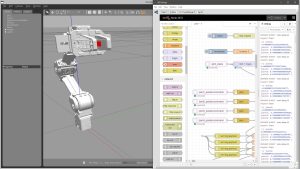
Node-REDのノードを開発してみる その5(wsl-ubuntuノード)
はじめに 今回はNode-REDでWSLのUbuntu環境を起動してコマンドを実行できる、wsl-ubuntuノードを開発してみました。 私はROSを起動するのにWSLのUbuntu環境を利用しています。コマンドを実 […]
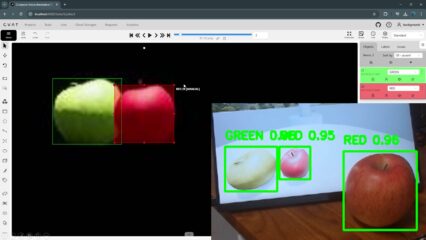
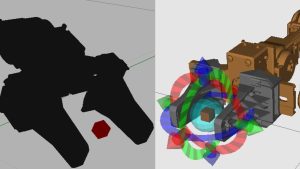
CVATでアノテーション(YOLO v8、Object Detection)
はじめに 今回はCVAT(Computer Vision Annotation Tool)でアノテーションを行ってみました。 画像に対してアノテーションを行い、YOLOで学習することで物体を検出できるようになります。 […]

ROS1を使ってみる その5(WSL2 Ubuntu 18.04、カメラ)
はじめに 今回はWSL2のUbuntu 18.04にROSをインストールし、カメラを利用してみました。 なぜUbuntu 18.04なのかというと、ロボットの画像処理用に使われていたJetson系のコンピュータにUb […]
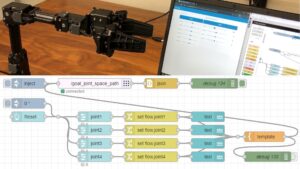
ROS1を使ってみる その3(Open Manipulatorの操作、Node-RED)
はじめに 今回はOpen ManipulatorのROS Serviceでの制御を確認し、Node-REDのノードでも操作してみました。 ROS Serviceを扱うのははじめてです。データ形式がややこしくてまだ完全 […]

ROS1を使ってみる その2(PythonのコードでPublishとSubscribe)
はじめに 今回はPythonのコードでROSのPublishとSubscribeを実行してみました。 これまでOpen Manipulatorを操作するのにROSを使っていたのですが、そのためのソフトウェアは用意され […]
WSL2のROSとWebSocket通信(ROS Bridge、Node-RED、Gazebo)
はじめに 今回はWSL2のROS NoeticとNode-REDで、WebSocket通信を行いました。 ROSで計算した数値をNode-REDで取得したかったのですが、調べているとROS Bridgeというものを見 […]
WSL2を使ってみる その4(Ubuntu 16.04、ROS Kinetic、Open Manipulator)
はじめに これまでWSL2にUbuntu 18.04、20.04、22.04をインストールして、ROS/ROS2の環境を構築しました。今回はUbuntu 16.04です。 オンラインドキュメントや書籍の情報が多かった […]

WSL2を使ってみる その3(Ubuntu 20.04、ROS Noetic、Open Manipulator)
はじめに 今回はWSL2のUbuntu 20.04に、ROSをインストールしてみました。 前回構築したのはWSL2のUbuntu 22.04です。WSL2で複数のバージョンのUbuntu環境をインストールできたので、 […]

WSL2を使ってみる その2(Ubuntu 22.04、ROS2 Iron)
はじめに 以前の記事でWindows環境にROS2の環境を構築しました。それ以降パッケージをインストールして利用しようとしていたのですが、インストールするときのコマンドがLinux用だったり、Windows環境では動か […]

WSL2を使ってみる その1(Ubuntu 22.04、Node-RED、メモリ制限)
はじめに 今回はWindows環境でLinuxディストリビューションをインストールできる、WSL(Windows Subsystem for Linux)の環境を構築してみました。 最近オープンソースのソフトウェアを […]