t-立脚のメカナムホイールについて
はじめに
今回はt-立脚に使っていたメカナムホイールについて紹介します。いろんな方向に進むことができる、ちょっと特殊なタイヤです。似たようなタイヤにオムニホイールというものがありますが、今回はメカナムホイールです。
▼これがt-立脚

▼実際の挙動
メカナムホイールをシャフトに固定する
タイヤをシャフトにどう固定するかというのは、一つの課題だと思います。t-立脚に使っているメカナムホイールは、詳しい情報が載っていなくて、固定できるのか不安でした。なにやら寸法が書いていたので、私がよく分かっていないだけかもしれません。仕方なく買ってから考えることにしたのですが、TAMIYAのギアボックスとなぜか相性が良かったです。
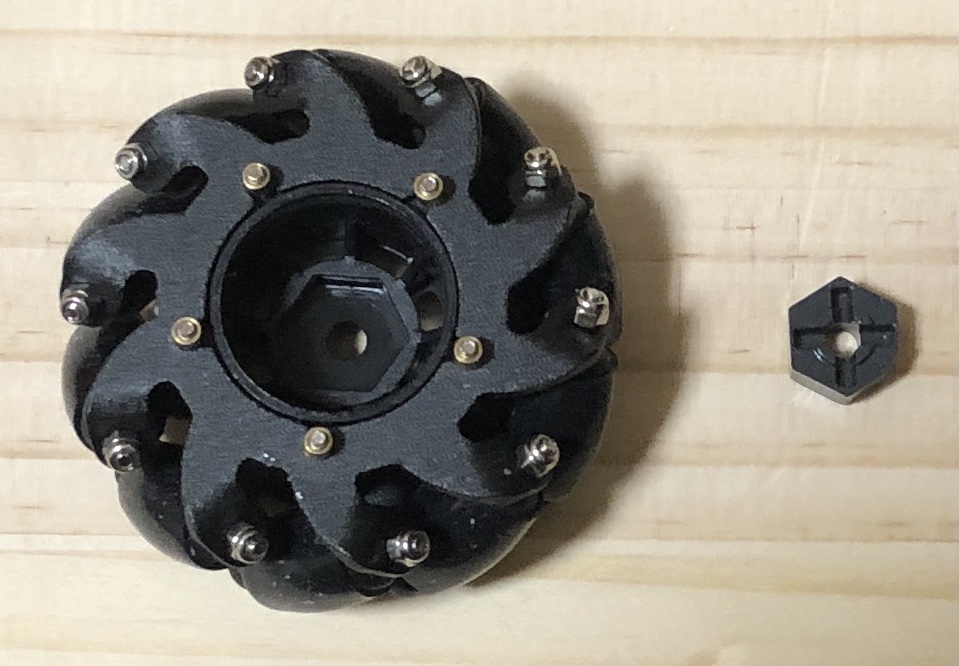
▼実際のメカナムホイール。右の六角形のパーツはギアボックスに入っていたものです。
仕方なく買うにしては高額なんですよね。これ以上高いものがたくさんあって、これでも安いものを選びました。とはいえ、自作するわけにもいきませんし…
メカナムホイールの中心に六角形の窪みがあるのが分かるでしょうか。写真の六角形のパーツが、見事にぴったりはまります。何か規格でもあるのでしょうか。このパーツには十字の窪みがありますが、これでギアボックスのシャフトにかみ合うようになっています。
▼実際に固定するまでの過程。シャフトに六角形のパーツ、メカナムホイールを通して、ナットで固定します。


メカナムホイールの制御
メカナムホイールの制御方向と進行方向については、図で非常に分かりやすく説明してくださっているサイトがあるので、そちらをご覧ください。
→ https://note.suzakugiken.jp/omni-mecanum-wheel-difference-ref-a/
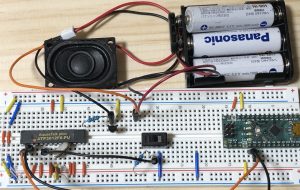
それぞれのタイヤが斜めに進むので、ベクトルの合成のようにして動くというイメージです。四つのタイヤを制御しなければならないので、デュアルモータードライバーであるTB6612FNGを2つ使って制御しています。
また、メカナムホイールは傾く方向の違いで2種類あるので、取り付けるときに注意して下さい。私が買ったメカナムホイールは、2種類を識別できるように赤と黄色のシールが貼っていました。
▼実際に使っていたモジュールやプログラムについてはこちら
t-立脚について
メカナムホイールを使った機体である「t-立脚」について紹介します。"t"はテトラの"t"です。歩行時の足を上げている期間を遊脚期、足が地面についている期間を立脚期と…
まとめ
t-立脚に使っていたメカナムホイールは、とても使いやすかったのでお勧めです。完全に偶然でしたが。メカナムホイールを使ってみたい!という方の参考になれば幸いです。
次に作る時はオムニホイールを使ってみたいのですが、高いんですよね。1個何千円するのに、3個か4個必要です。いい感じの機体を思いついたら、作ってみようと思います。
趣味的ロボット研究所をもっと見る
購読すると最新の投稿がメールで送信されます。