
小型の二輪ロボットを作る:機体製作編

はじめに
今回は小型の二輪ロボットを作ってみました。機体だけ作ったので、回路はまだです。何と呼べばいいのか分からないのですが、まずは完成品をご覧ください。
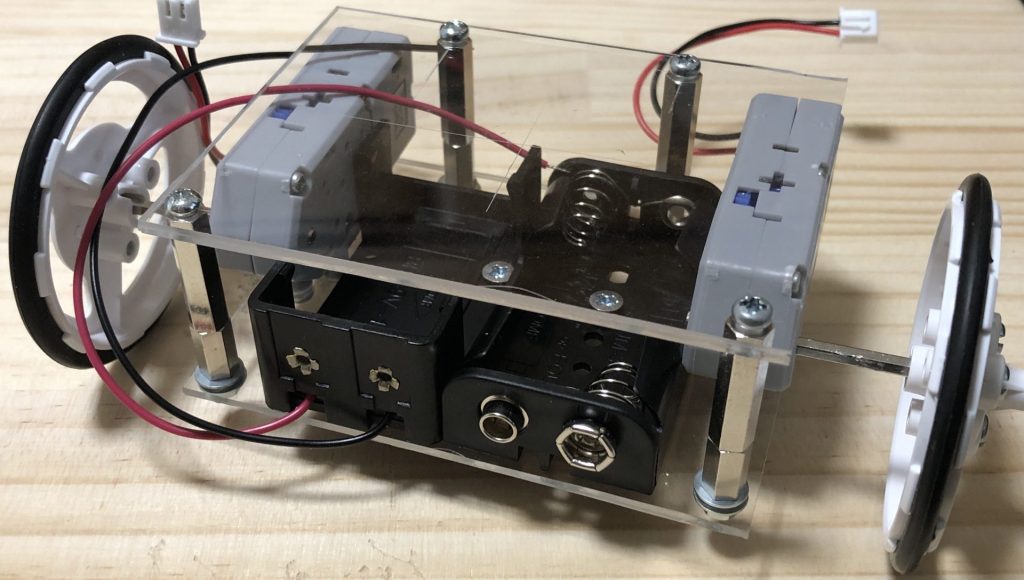
タミヤのミニモーターとスリムタイヤを使った、小型の機体です。思いつくままに作ってしまったので設計図が無いのですが、簡単に作れます。
過去にチームで製作した時にも二輪のロボットを作りました。そのときは直径30cmの円柱をスポンジゴムから切り出して、タイヤも作ったのですが、今回は直径6cmです。随分と小型化しています。
相変わらず単純な構造で、アクリル板2枚をスペーサーで固定して、そこに部品を配置しています。角型電池はマイコンへの電源供給、単三電池×2はモーターへの電源供給に使う予定です。
材料について
材料を列挙しておきます。
- タミヤのミニモーター薄型ギアボックス×2(シャフトは違うものを使っています)
- タミヤのスリムタイヤセット
- タミヤのローハイトボールキャスター
- 電池ボックス:単三電池×2、角型電池
- 透明のアクリル板:厚さ2mm(ホームセンターで売っています)
- 3mmのスペーサー(Amazonで売っている、ナイロン製で詰め合わせのものがおすすめです)
- 3mmのねじ、ナット
製作過程
7cm×9cmのアクリル板を2枚切り出して、そこに部品を配置しています。
まず、一枚のアクリル板に電池ボックス、ギアボックス、キャスターを配置して、マスキングテープで固定しました。これで大体の位置に印をつけて、穴を空けています。本来は寸法を測るべきかもしれませんが、これでうまくいきました。
ねじの直径が3mmなのですが、ちょっとしたずれを許容するために3.2mmの穴を空けています。
▼マスキングテープで固定したところ。マスキングテープもタミヤのものを使っていますが、こだわりはありません。
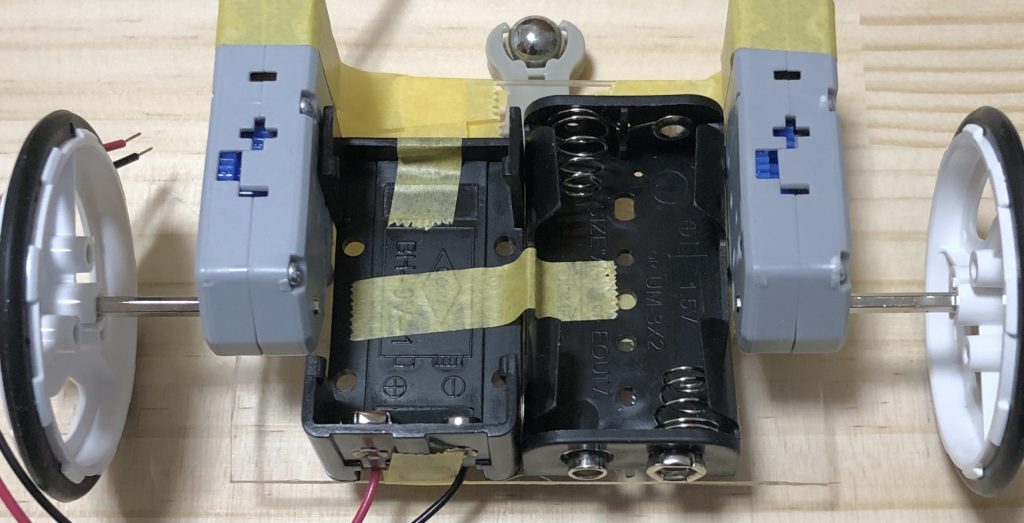
▼実際に穴を空けて、ねじとナットで固定したところ。電池ボックスの固定には皿ねじを使っています。ねじ頭が邪魔にならないようにするためです。


キャスターの高さがちょうど良くて、機体を水平に保ってくれている……気がします。
空いている所に、スペーサー用の穴を空けます。穴の中心がアクリル板の角に近すぎると割れてしまうのですが、各辺から5mmぐらい離れていれば大丈夫です。ただし5mmずつ離していても、4mmの穴を空けようとすると経験上割れます。
▼スペーサーを取り付けたところ。二枚のアクリル板の、穴の位置を揃える必要があるのですが、クランプで挟んでそのまま穴を空けました。

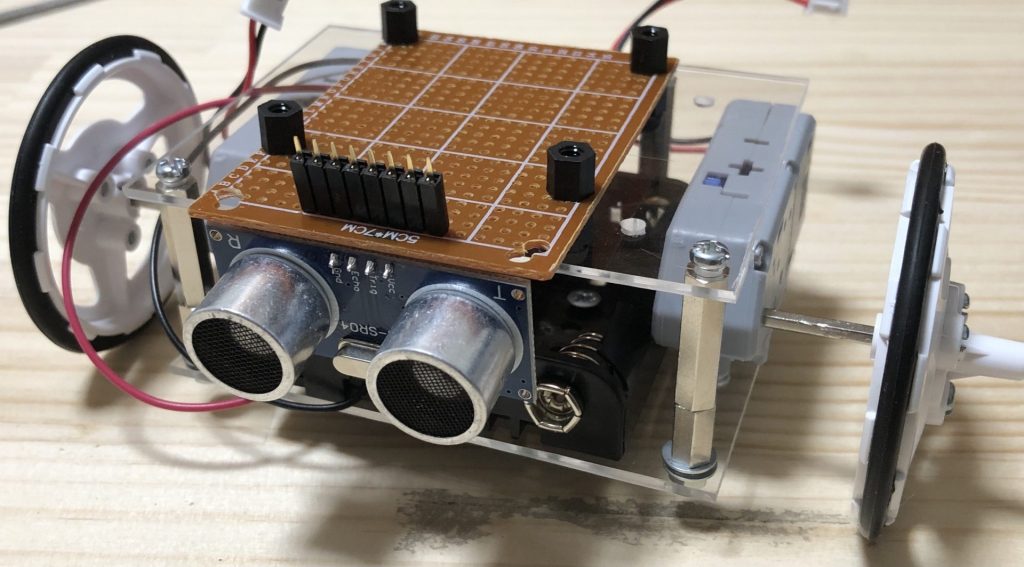
さらに上のアクリル板に基板を固定するための穴を空けています。
▼超音波センサーを写真のように固定したくて、基板にも穴を空けています。こういう見た目の工作キットをよく見かけますね。
最後に
シャフトが長すぎる感じがあるのですが、金属なので切断できます。後々調整しようと思います。
機体だけ完成したので、次は回路を作る予定です。今のところモータードライバーとマイコン、超音波センサーや加速度センサーなどのセンサー類、遠隔操作をするためのXBeeを使おうと思っています。どれも使ったことがあるので、難なく作れると思います。
問題はプログラミングで、結構複雑になると思いますし、あまり慣れていません。進捗があればまた投稿します。
趣味的ロボット研究所をもっと見る
購読すると最新の投稿がメールで送信されます。

