
小型の二輪ロボットを作る:はんだ付け編
はじめに
二輪ロボットの機体を製作して、回路も組んだので、今回ははんだ付けです。
久しぶりにはんだ付けをしたら、こて先が酸化していたり派手な凡ミスをやらかしたりして、結構手間取っていました。実は一度やり直すことになって、かなりのショックを受けています。
配線が複雑になっているので、初心者の方には全くお勧めしません。配線の方法について、私はまだ手探りの状態です。特に電線をどうやって使うのかが分かっていません。参考になる情報を探しています。
そもそもユニバーサル基板が小さすぎて複雑になっているので、もっと大きな基板を使えばやりやすくなります。もし作りたいのであれば、大きな基板で余裕を持った配線をしてください。
基板の回路と配線
配線をするにあたって、以前とは少し回路が変わっているところがあります。
▼Arduino NanoとMotorDriverをつなぐ配線の、斜めになっていたところを真っ直ぐにしています。


▼上の配線図がやり直し前で、下の配線図がやり直し後です。電池が増えたのでコネクタも増えました。
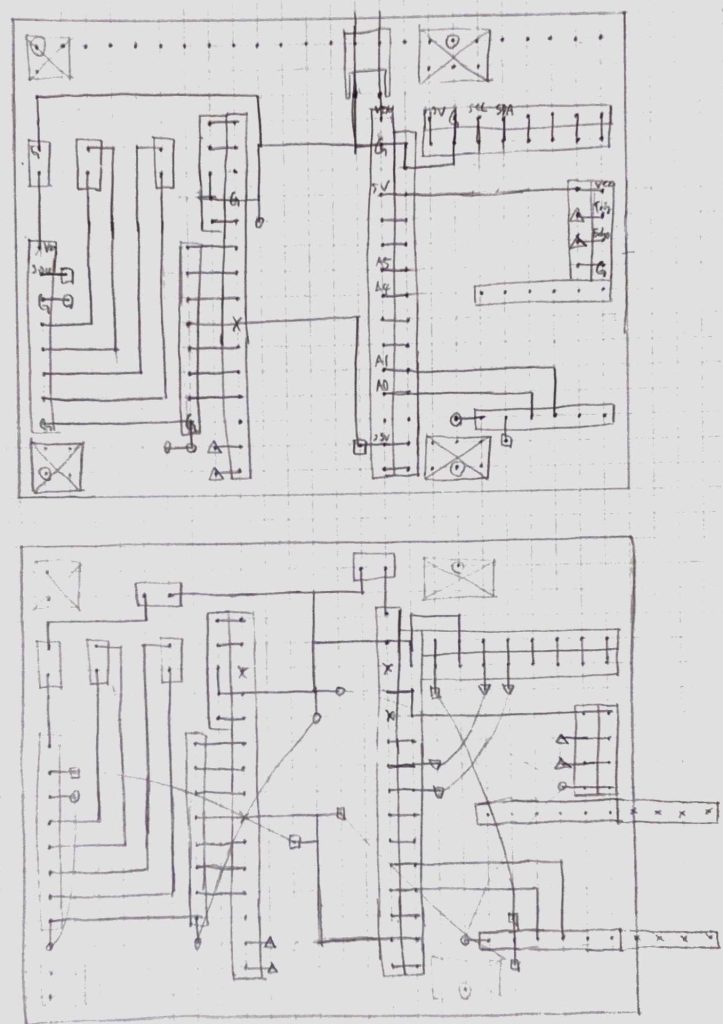
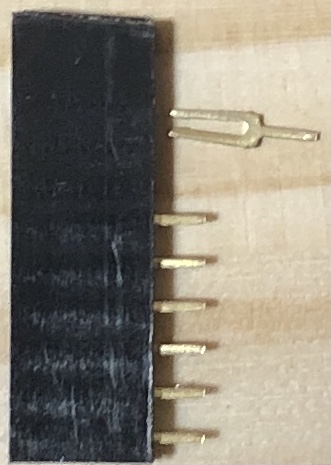
配線図のバツ印がついている部分は、モジュールのピンに導通してほしくないところです。ちょっと反則気味というか、褒められた方法ではないように思うのですが、ピンソケットから金属部分を引っこ抜いて導通しないようにしています。
▼ピンソケットから金属部分を引っこ抜いたところ。ペンチで引っ張ったら抜けます。
はんだ付けをする
先に述べたように、一度はんだ付けをやり直しています。なぜかというと、ピンソケットが穴一つ分ずれていたからです。初めてこんなミスをしました。完成したと思って喜んでいたら、モジュールが入らなくて本当に絶望しました。二度とこんなミスしません。
▼失敗した基板。モータードライバーとArduino Nanoのところが右にずれています。


はんだ付けをしているときにピンソケットが邪魔でやりにくかったりしたので、配線図やはんだ付けの順番を変更してやり直しました。元々はジャンパ線で繋げようとしていたのですが、電線で繋げることにしたので、電線が増えています。
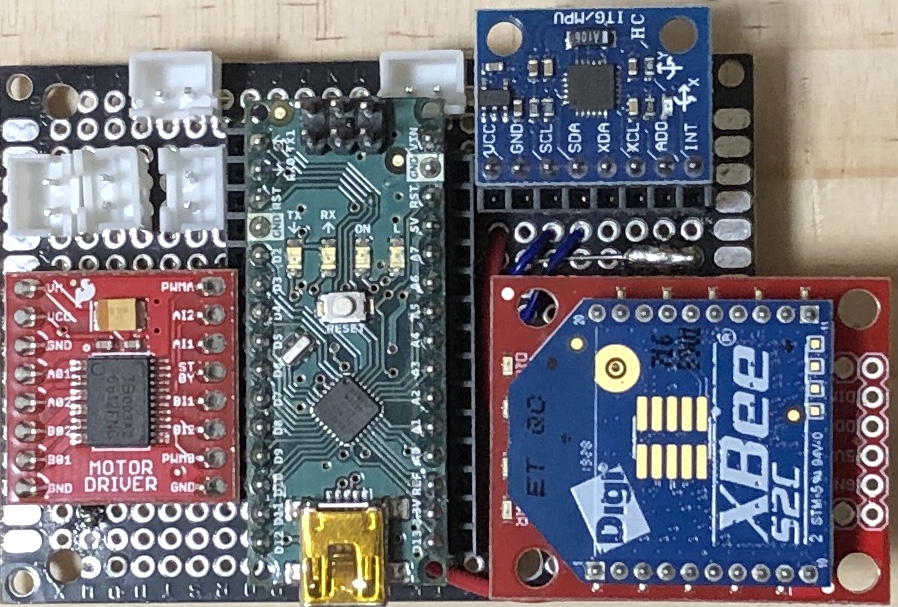
▼最終的な基板。結局複雑になってしまいました。電線が危なっかしいので、この後絶縁テープを貼りまくっています。


▼モジュールを挿したところ。本当に狭いですね。
はんだ付け中に気づいたこと
前回新調したはんだごてで、はんだ付けをしました。温度調節機能があるおかげか、加熱しすぎることが無かったように思います。
▼前回の記事
ちょっと買い物:はんだごて編
はじめに 最近作っている二輪ロボットの回路が確定して、はんだ付けをしようとした矢先、はんだごてのこて先が酸化していることに気づきました。何とかならないかと思い…

今まではこて先の温度を意識していなかったというか、調整しようがなかったので、下記のサイトを参考に調節しています。はんだの融点+?℃で調節するらしいですね。
→https://www.hakko.com/japan/support/maintenance/detail.php?seq=47
▼新調したはんだごて。温度を1℃単位で調節できることに、使ってから気づきました。数値で見たら、温度の変化が意外と早かったです。

前回はんだごてと一緒に購入した電線も使ってみました。「はんだ耐熱性にすぐれている」とのことでしたが、被膜が全然溶けていませんでした。
▼前回購入した電線


対して、ホームセンターで買った工作用コードは熱に弱すぎて、被膜が溶けてしまっている部分がありました。短絡しかねないので、電線に絶縁テープを巻いたうえで、基板の裏にも絶縁テープを貼っています。今頃はべとべとになっていることでしょう。
一カ所だけ、絶縁用の収縮チューブを使ってみました。絶縁テープよりもぴったり密着して絶縁されていたので、電線の絶縁は収縮チューブのほうがよさそうです。電線の両端をはんだ付けする前に、収縮チューブを通しておくのを忘れていなければ使えます。
また、電線の被膜を剥くためにワイヤーストリッパーというものを購入しました。実は今までニッパーで切り込みを入れて剥いていたんですよね。本職の人に怒られそうです。細い電線だと導線ごと切ってしまって剥けなかったので購入しました。
▼購入したワイヤーストリッパー。調節ねじで30AWGから8AWGまで剥けます。調節ねじの説明が無かったのですが、+か-しか書いてなくて、回すだけなので特に難しい操作はありません。

▼動画での説明もありました。
フジ矢オートマルチストリッパーPP707A-200使用方法 - YouTube
動作確認
はんだ付けを終えたら、すぐにモジュールを挿して動作確認をしたいところですが、その前にテスターで導通チェックをしています。
導通してほしいところが導通しているかのチェックはもちろんですが、導通してほしくないところが導通していないかのチェックも入念に行っています。もしかしたら近くのはんだが接触しているかもしれません。今のところ導通していたことはないのですが、念のためにすべて確認しています。とにかく事故を起こしたくないのです。
以前のプログラムだとモーターが動かなくて焦ったのですが、回路に変更があったのを忘れていました。ピンを変更する必要があります。
その後、モジュールを一つずつ増やして、プログラムを書き込んで動作確認をしていったのですが、すべて問題なく動作しました。はんだ付け完了です。
最後に
基板の動作確認もできたので、あと少しで完成です。電池を追加で固定する必要がありますが、あとはプログラム次第で調整できると思います。
今回はんだ付けしていて、収縮チューブが使いやすかったので使っていこうと思います。ピンソケットの位置ずれは二度としません。

