
初投稿!
趣味でロボットを作っています。工学系の大学所属、現在二回生です。一回生のときにチームで製作した経験があり、その後は個人で作ったりチームで作ったりしています。
今回は個人で製作したものについて紹介します。詳細については、別の記事で説明する予定です。
メカナムホイールを使ったロボット(t-立脚)
メカナムホイールを使ってみたい!という気持ちが逸って製作した機体です。
▼外観はこんな感じ


設計せずに作った結果、見たことがない形になりました。
この機体には「t-立脚」(テトラ-立脚)という名前を付けました。歩行中に足が地面についている期間を立脚期と呼ぶそうですが、そこから名付けました。
構造はシンプルで、板三枚を積み重ねているだけです。
メカナムホイールは前後移動だけでなく、左右に移動したり、回転することができる変わったタイヤです。
この機体は今後改造してく予定です。
立方体型の機体(7-cube)
ロボットというよりは脳幹のイメージです。いろんな機能を詰め込んだ機体を作りたくて、製作しました。
▼外観はこんな感じ


内側が一辺7cmの立方体になっているので、「7-cube」と名付けました。
この箱を作るのに三日ほどかかりました。試行錯誤の結果です。そのぶん、材料の加工に必要なことを体得できたように思います。
▼内部はこんな感じ
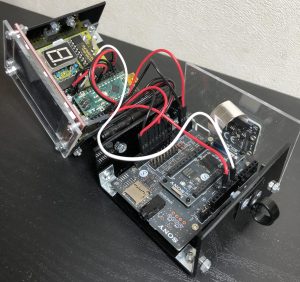

マイコン、IC、ディスプレイ、カメラなどを詰め込みに詰め込みました。詰め込みすぎた結果、スピーカーが収まりきっていません。バッテリーも外付けです。
「Spresense」というマイコンをメインに使っています。すでに配線された状態なので、USB経由でプログラムを書き込めばすぐに使えます。
作ってみたものの、気に入らないところがいろいろとあるので、近いうちに作り直す予定です。まず箱の留め具が気に入っていません。結構出っ張っています。基板もあまり気に入っていません。ディスプレイがあるんだから7セグメントLED(8の字のもの)は要らない...
製作した感想
ロボットを作っていて常々思うことは、情報が少ない!ということです。材料の加工、回路の設計、プログラムの実行例などなど。常に試行錯誤しています。
しかも個人で作るとなると、様々な分野の技術を学ばなければなりません。私は本来機械系ですが、情報系や電気系のことについても学んでいます。
このサイトでは、できるだけ私が試行錯誤したその過程も掲載する予定です。モノづくりをしたい人たちの参考になれば幸いです。