
ここではWSL2関連の情報を集めています。
関連記事
-

ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
-
WordPressを使ってみる その1(WSL2 Ubuntu 22.04環境へのインストール)
-
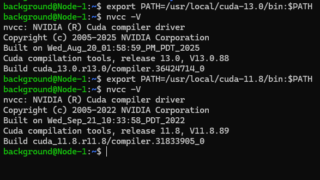
複数のCUDAのバージョンを切り替える(WSL2 Ubuntu 22.04)
-
Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
-
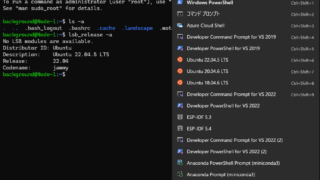
WSL2を使ってみる その5(同じバージョンのディストリビューションを複数インストール、Ubuntu 22.04)
-
Node-REDのノードを開発してみる その5(wsl-ubuntuノード)
-
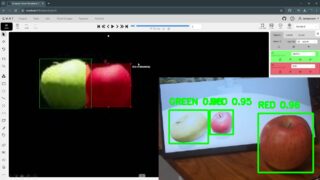
CVATでアノテーション(YOLO v8、Object Detection)
-
ROS1を使ってみる その5(WSL2 Ubuntu 18.04、カメラ)
-
ROS1を使ってみる その3(Open Manipulatorの操作、Node-RED)
-
ROS1を使ってみる その2(PythonのコードでPublishとSubscribe)
-
WSL2のROSとWebSocket通信(ROS Bridge、Node-RED、Gazebo)
-
WSL2を使ってみる その4(Ubuntu 16.04、ROS Kinetic、Open Manipulator)
-
WSL2を使ってみる その3(Ubuntu 20.04、ROS Noetic、Open Manipulator)
-
WSL2を使ってみる その2(Ubuntu 22.04、ROS2 Iron)
-
WSL2を使ってみる その1(Ubuntu 22.04、Node-RED、メモリ制限)







Linux環境のフォルダへのアクセス
Windows側のエクスプローラーで、Linuxの欄からアクセスできます。
▼インストールしたディストリビューションごとにフォルダが作成されています。
なおファイルの追加もエクスプローラーで可能なのですが、Zone.Identifierというファイルが追加されます。セキュリティのためのものですが、削除しても問題ありません。
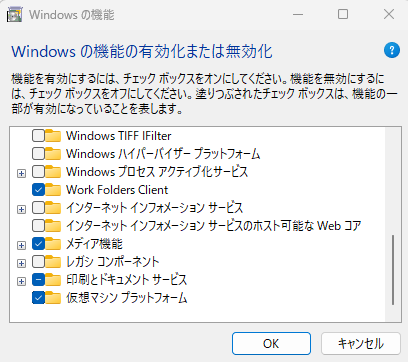
起動できないとき
Hyper-Vが無効になると、WSL2でLinux環境を利用できないことがあります。
▼「必要な機能がインストールされていないため、操作を開始できませんでした」と表示され、ターミナルにログインできません。

「Windowsの機能の有効化または無効化」で仮想マシンプラットフォームを有効化します。
▼バージョンによって名前が異なる可能性があります。
▼機能の変更後再起動すると、WSL2でLinux環境を起動できるかと思います。
Ubuntu 22.04の複数インストール
▼以下の記事でも紹介しています。
WSL2を使ってみる その5(同じバージョンのディストリビューションを複数インストール、Ubuntu 22.04)
はじめに 今回はWSL2で同じバージョンのUbuntu環境をもう一つインストールしました。 元々インストールしていたWSL2のUbuntu 22.04の環境を壊したくなかったので、別…

▼WSL2用のUbuntu 22.04のイメージファイルは、以下のページからダウンロードできます。
https://cloud-images.ubuntu.com/wsl/jammy/current
管理者権限でPowerShellを起動し、コマンドを実行していきます。
まずは一時的な環境変数としてフォルダ名や環境名、ユーザー名、パスワードなどを指定します。<>で囲んでいる部分やファイルのパスは適宜変更してください。
$distroName = "<your distro name>"
$installPath = "W:\$distroName"
$winUser = $env:USERNAME
$tarPath = "C:\Users\$winUser\Downloads\ubuntu-jammy-wsl-amd64-ubuntu22.04lts.rootfs.tar.gz"
$ubuntuUser = "<your username>"
$ubuntuPass = "<your password>"以下のコマンドでUbuntuのインポートやユーザー名、パスワードの設定を行います。
if (!(Test-Path $installPath)) { mkdir $installPath }
wsl --import $distroName $installPath $tarPath
wsl -d $distroName --user root sh -c "
adduser --disabled-password --gecos '' ${ubuntuUser} &&
echo '${ubuntuUser}:${ubuntuPass}' | chpasswd &&
usermod -aG sudo ${ubuntuUser} &&
printf '[user]\ndefault=${ubuntuUser}\n' >> /etc/wsl.conf
"追加したUbuntu環境を有効化します。Ubuntu環境から出るときは、exitと入力するかCtrl + Dを入力してください。
wsl --terminate $distroName
wsl -d $distroNameインストール済みの環境の一覧は以下のコマンドで確認できます。
wsl -l -v登録を解除するときは以下のコマンドです。
wsl --unregister $distroName