ここではROS/ROS2関連の情報を集めています。
-

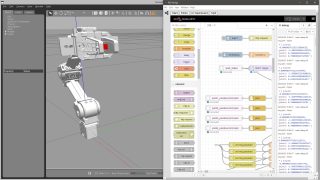
ROS2を使ってみる その4(OpenManipulatorのシミュレーション、WSL2 Ubuntu 22.04)
-
ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
-
Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
-
Jetson Xavierを使ってみる その4(ROS、Tailscaleを利用した画像データの送受信)
-
Jetson Xavierを使ってみる その3(ROSの環境構築、USBカメラ映像のPublish)
-
YOLOで物体検出 その3(ROSとの連携、WSL2 Ubuntu 18.04)
-
ROS1を使ってみる その5(WSL2 Ubuntu 18.04、カメラ)
-
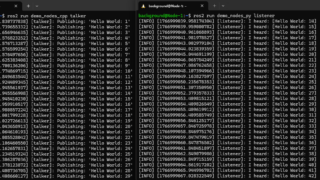
ROS1を使ってみる その2(PythonのコードでPublishとSubscribe)
-
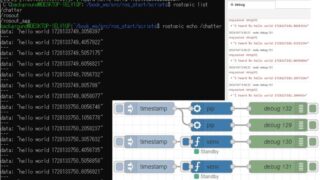
WSL2のROSとWebSocket通信(ROS Bridge、Node-RED、Gazebo)
-
WSL2を使ってみる その4(Ubuntu 16.04、ROS Kinetic、Open Manipulator)
-
WSL2を使ってみる その3(Ubuntu 20.04、ROS Noetic、Open Manipulator)
-
WSL2を使ってみる その2(Ubuntu 22.04、ROS2 Iron)