
t-立脚について
メカナムホイールを使った機体である「t-立脚」について紹介します。"t"はテトラの"t"です。歩行時の足を上げている期間を遊脚期、足が地面についている期間を立脚期と呼ぶそうなのですが、そこから名前を付けました。歩行型のロボットも作りたいところ。
▼t-立脚はこの機体のこと

なお全部細かく説明すると長くなるので、モジュールと構造作成に絞って紹介します。
モジュールについて
マイコンにはArduino Nanoを使っています。各モジュールに命令する役割を担っていて、パソコンからプログラムを書き込みます。
モーターの制御にはTB6612FNGというデュアルモータードライバーを使っています。これ一個で2つのモーターを制御できます。四つのメカナムホイールを別々に制御する必要があるので、2つ使っています。Spark Fan製のものと廉価品があるのですが、前者の製品が手に入れにくかったので、廉価品を使っています。何の問題もなく動作しています。
t-立脚は、X-Beeを使って無線通信をすることができます。パソコンからの指令で、ラジコンのように制御することが可能です。
▼使ったモジュール



機体の構造作成
意外とシンプルな構造をしていて、実は厚さ2mmのアクリル板を重ねているだけです。一番下に大きい板があって、ギアボックスとスペーサーを取り付けています。スペーサーで間をあけて、一辺10cmの板をどんどん重ねることができます。板に何を載せるかによって、いろんな使い方ができます。
▼横から見た写真。アクリル板を重ねているだけ
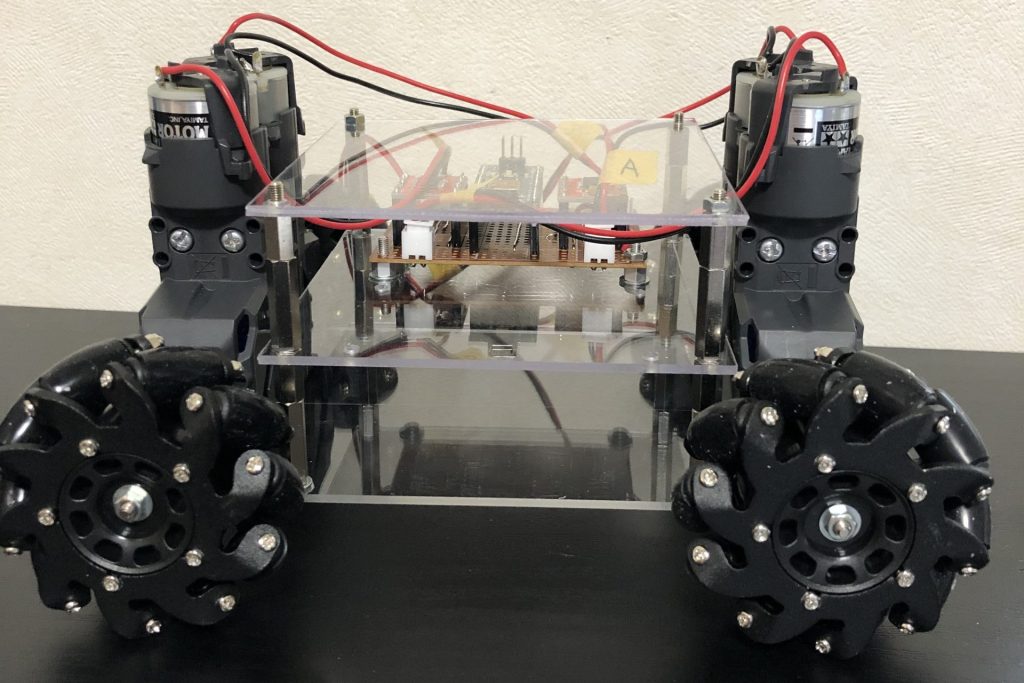
上に重ねているアクリル板は、穴の位置が精密に作られています。寸分違わず揃っているので、板の向きを変えることができます。穴の大きさが、スペーサーの直径である3mmと全く同じなので、少しでもずれたら嵌りません。やっぱり精密加工ができるのはプラスチックの大きな利点だと思います。
そんなにぎりぎりに作らなくても、余裕をもって3.2mmとかにしても大丈夫と知ったのは後のことなんですよね……
▼向きを変えた状態。横からマイコンにUSBを挿せるようにしておくと、いちいち板を外さずにプログラムを書き換えることができます。


アクリル板の切断と穴あけには、プラスチックカッターとドリルしか使っていません。これまた単純。全部手作業です。
▼実際に使ったドリルとプラスチックカッター


走行試験での動作
▼プログラムはこちら
https://create.arduino.cc/editor/404background/6ee7fe7f-7a5b-4466-9ec5-7c85402c964f/preview
▼実際に走らせた時の様子がこちら
メカナムホイールを使っているので、あらゆる方向に走らせることができます。他の人に見せたら、横移動した瞬間に驚かれますね。メカナムホイールについての詳しい解説は別の機会にする予定です。
今後の予定
t-立脚をとりあえず走るところまでは作成しました。試作機一号ということもあって、もうすでに改良したいところが結構あるので、以下に列挙しておきます。
- 実は大きい板が作成中に割れて、想定していたよりも短くなっている。そのせいで電池を置くスペースが狭い。
- 基板にミスがある。モジュールの足の幅間違い、不要なところがある、などなど…
- ジャンパ線で差し替えられるようにしたが、正直邪魔。
時間があるときに改良しようと思います。また、モジュールを追加して機能を増やしていく予定です。カメラは欲しい。
進捗があれば投稿しますので、よければご覧ください。

