
電気・電子回路

YDLIDAR X4 Proを使ってみる その2(ミニPC、Linuxでの動作確認)
はじめに 今回はLinux環境でYDLIDAR X4 Proの動作確認を行いました。 前回はWindows環境でしたが、ロボットに搭載するPCがLinux環境のミニPCなので、その環境での動作確認です。 ▼Windo […]

YDLIDAR X4 Proを使ってみる その1(Windows、GUIアプリでの動作確認)
はじめに 今回はLiDARを購入したので、動作確認を行ってみました。 LiDARは他の安価なセンサーに比べると高額で、搭載できるロボットがなかったので触っていなかったのですが、設計中の移動ロボットに搭載できそうだった […]
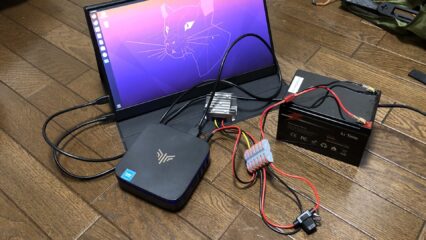
リン酸鉄リチウムイオンバッテリーを使ってみる その2(ミニPCへの電源供給、LiTime 12V12Ah LiFePO4)
はじめに 今回は以前購入したリン酸鉄リチウムイオンバッテリーを使って、ミニPCへの電源供給ができないか試してみました。 普段はACアダプタでDC12Vに変換して供給しているわけですが、バッテリーで供給できれば移動する […]

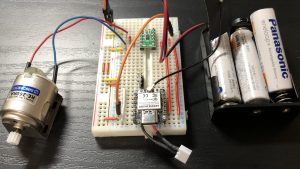
ポンプモジュールを使ってみる(チューブポンプ PP310-030、植物の水やり)
はじめに 去年の話ですが、学会でトマトの苗をもらって栽培を自動化しようと画策していました。 その一環でポンプモジュールも試していたので、今回はそのまとめです。自動化する前に枯れてしまったので、また育てることがあったら […]

リン酸鉄リチウムイオンバッテリーを使ってみる その1(LiTime 12V12Ah LiFePO4)
はじめに 今回はリン酸鉄リチウムイオンバッテリーを購入して、コネクタなどを作成して使えるようにしてみました。 ロボコンではよくリポバッテリーを使っていて、他の方が使っている話もよく聞くのですが、バッテリーが膨らんだと […]
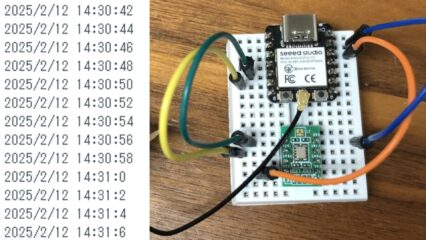
XIAO ESP32C3を使ってみる その7(RTC、ネットワークの時刻取得)
はじめに 今回はマイコンでRTCとネットワークを利用した時刻の取得について試してみました。 IoT用途として、水やりなどに使いたいなと思っています。 ▼家でトマトを育てていたのですが、自動化したいなと思いつつ特に進展 […]

RumiCar-C3の製作 回路設計編(Quadcept)
はじめに 今年に入ってから開発を進めていたRumiCar-C3について、今回から少しずつ記事にまとめていこうと思います。 まずは回路設計編です。あと車体設計編と、プログラミング編を書いているところです。 ▼Proto […]

距離センサーを使ってみる その1(VL53L0X)
はじめに 今回は距離センサーのVL53L0Xを使ってみました。自動運転アルゴリズム開発プラットフォームのRumiCarでも使われていたものです。 ▼RumiCarのリポジトリはこちら https://github.co […]
モータードライバーを使ってモーターを制御する その2(DRV8835)
はじめに 今回はモータードライバーのDRV8835を使ってみました。普段からよく使っているTB6612FNGとは制御方法が異なります。基板の大きさがこちらのほうが小さいですね。 DRV8835は以前出展のお手伝いで関 […]
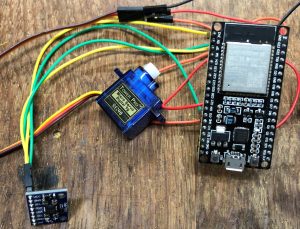
加速度センサーを使ってみる その1(MPU6050、ESP32、デュアルコア)
はじめに 今回は加速度センサーのMPU6050を使ってみました。いつも使っているスターターキットに入っていたものです。GY-521と印字されていますが、MPU6050と変わりません。 ▼GY-521はこちら。チップがM […]
I/O Expanderを使ってみる その2(MCP23017)
はじめに 以前MCP23S08というI/O Expanderを使いましたが、今回はMCP23017です。 MCP23017はI2C通信で16ピンまで増やせます。しかもアドレスを指定するピンが3つあるので、8つまで追加 […]
nRF52840を使ってみる その1(Seeed Studio XIAO nRF52840 Sense)
はじめに 今回はSeeed Studio XIAO nRF52840というマイコンを使ってみました。小型でありながらBLE、加速度センサー、マイクなどを搭載しています。最近はSeeed Studioの小型マイコンを愛用 […]

モータードライバーを使ってモーターを制御する その1(TB6612FNG)
はじめに 今回はデュアルモータードライバーのTB6612FNGを紹介します。これまで小型のロボットに散々使ってきましたが、改めての紹介です。 TAMIYA製品との相性が良くて、私はギアボックスを制御するのに使っていま […]
I/O Expanderを使ってみる その1(MCP23S08-E/P)
はじめに 今回はI/O ExpanderのMCP23S08を使ってみました。 I/O Expanderを使うと、マイコンのピンを増やすことができます。SPI通信やI2C通信でI/O Expanderのピンを制御するの […]

チップ部品のはんだ付け:実践編(ESP-WROOM-02)
はじめに 以前の記事でチップ部品のはんだ付けを練習しましたが、今回は実践編です。 ESP-WROOM-02と変換基板のセットがあったので購入しました。はんだ付け練習キットだとどうしても動作確認ができなかったので、こち […]

ステッピングモーターを使ってみる(DRV8833、TB6612FNG)
はじめに 今回はステッピングモーターを使ってみました。ステッピングモーターのなかでもバイポーラ型のものです。ステッピングモーター用のモジュールを探していたときにDRV8833を見つけたので買いました。Adafruit製 […]

小型の二輪ロボットをPS4のコントローラで操作する(ESP32)
はじめに これまでの記事でESP32とPS4のコントローラをBluetoothで接続することができたので、今回はコントローラで実際にロボットを制御してみました。以前製作した小型の二輪ロボットこと、コマゴマ一号の上に、無 […]

チップ部品をはんだ付けする
はじめに 今回はチップ部品のはんだ付けに挑戦しました。サンハヤトの「ハンダ付け技能練習セット」をお店で買ってから、いろいろ調べて試していたのですが、なかなかうまくいかない状況が続いていました。 そんな中、電子工作に詳 […]

MCP2561を使ってCAN通信をする(ESP32)
はじめに 今回はMCP2561というCANトランシーバを使って、CAN通信を試してみました。 ▼こちらのMCP2561を使いました。 https://akizukidenshi.com/catalog/g/gI-124 […]
ATP3012をI2C通信で使う
はじめに 今回は音声合成LSIのATP3012を、I2C通信で使ってみました。UART通信であれば何度も使ったことがあるのですが、I2C通信で使うのはこれが初めてです。 I2C通信は2線だけで複数のデバイスと通信でき […]


小型の二輪ロボットを作る:はんだ付け編
はじめに 二輪ロボットの機体を製作して、回路も組んだので、今回ははんだ付けです。 久しぶりにはんだ付けをしたら、こて先が酸化していたり派手な凡ミスをやらかしたりして、結構手間取っていました。実は一度やり直すことになっ […]

ちょっと買い物:はんだごて編
はじめに 最近作っている二輪ロボットの回路が確定して、はんだ付けをしようとした矢先、はんだごてのこて先が酸化していることに気づきました。何とかならないかと思い、こて先にはんだを付けてスポンジで拭くのを繰り返していたら使 […]

小型の二輪ロボットを作る:回路編
はじめに 前回二輪ロボットの機体だけ作ったのですが、今回は回路です。ほとんど使ったことがある部品だったので難なく組むことができたのですが、電池を増やさないといけなくなってしまいました。その経緯も紹介しようと思います。 […]

ちょっと買い物&破壊
買ったもの紹介 大学の期末試験のために1か月ほど集中して勉強していたのですが、やっと終わりましたので、部品を買いに大阪の日本橋に行ってきました。その紹介をしようと思うのですが、先に言っておくとCPUファンを早速壊してい […]

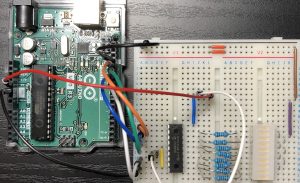
Arduino Dueを使ってJoystickMouseControl
はじめに タイトルの「JoystickMouseControl」というのは、Arduino IDEに内蔵されているスケッチ例の名前です。今回はジョイスティックで、マウスのようにパソコンを操作してみました。 ▼Ardui […]

フォトリフレクタを使ってみる(LBR-127HLD)
はじめに 今回はフォトリフレクタを使って、二つの回路を試してみました。以前使ったフォトカプラとよく似ていて、同じような回路ですが、フォトリフレクタにはセンサーとしての使い方があります。 ▼フォトリフレクタ ▼以前の記事 […]
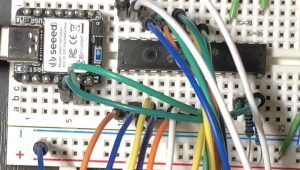
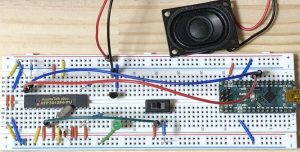
音声合成LSIを使って、日本語の音声を出力する(ATP3012)
はじめに (ICはIntegrated Circuit(集積回路)の略、LSIはLarge Scale Integration(大規模集積回路)の略です。つまりICがたくさん集まったのがLSIです。) 今回は音声合成L […]

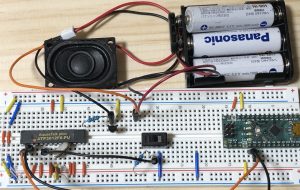
フォトカプラで、モーターとマイコンを絶縁する(TLP627,TA7257P)
以前、フォトカプラのTLP627で回路を絶縁し、出力先のHIGHとLOWを制御をしました。今回は同じフォトカプラ二個とモータードライバーを使って、モーターを制御します。モーターも以前に使ったものです。 モータードライバ […]
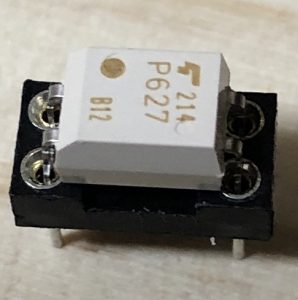
フォトカプラを使ってみる(TLP627)
今回はフォトカプラを使ってみました。フォトカプラは回路を絶縁するために使います。モーターのように大電流を使う回路と、制御用の回路を絶縁しておくと、マイコンを保護したりすることができます。 ▼今回使ったTLP627。白い […]