こちらは学生ファブリケーションフェス2024関連のページです。
学生ファブリケーションフェス2024 大阪芸大 and more - The DECK[ザ・デッキ]
2024年1月、The DECKと学生のコラボイベントの季節がまたキターーーーー✨━(゚∀゚)━!✨3Dプリンタやレーザーカッターなどを使用したデジタルファブリケーション作品展を開催…

▼展示会の様子



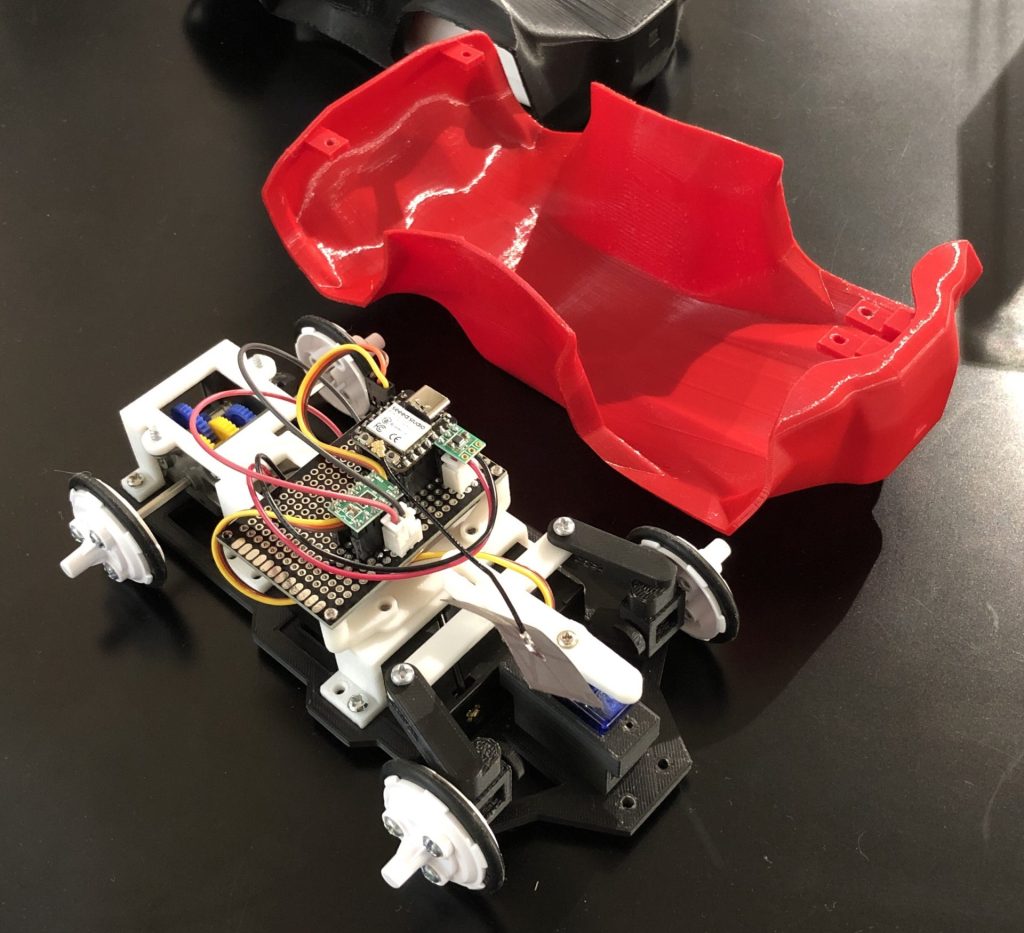
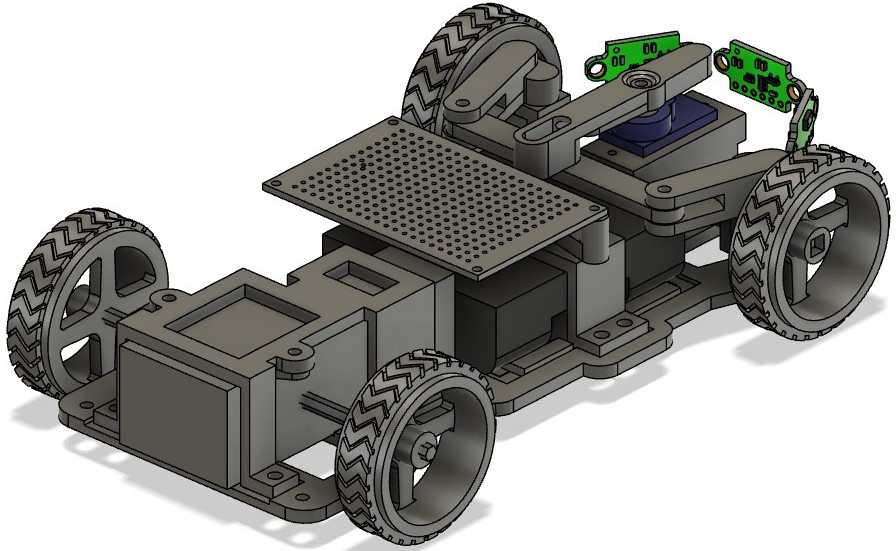
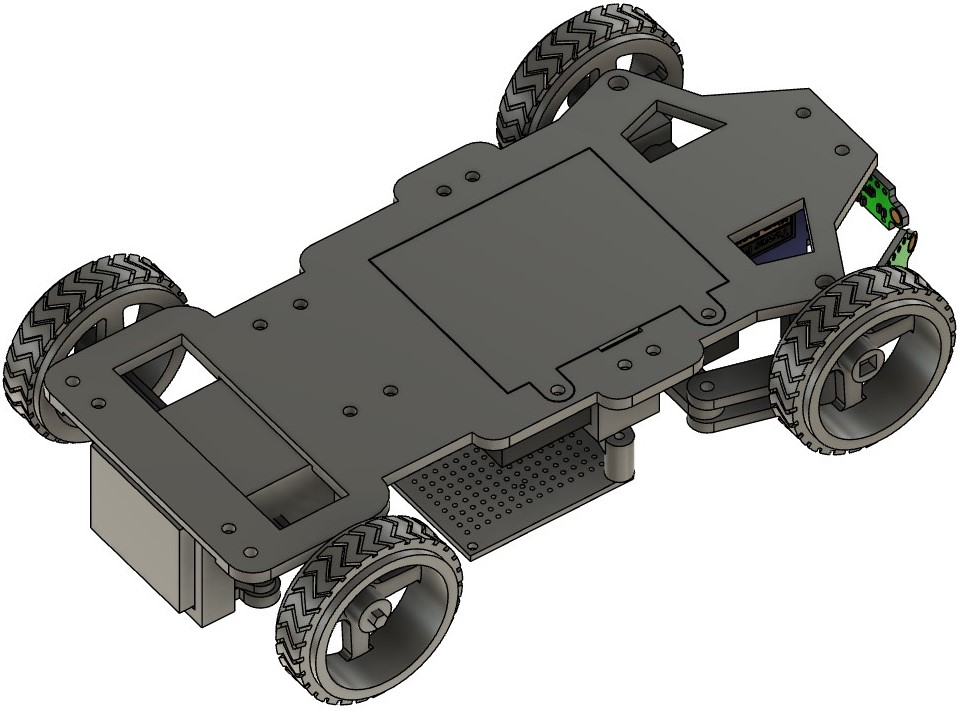
RumiCar-C3(試作機)
▼筐体、回路図、プログラムの詳細は、GitHubのリポジトリをご覧ください。
https://github.com/404background/RumiCar-C3
▼RumiCarは自動運転アルゴリズムの開発プラットフォームです。以前出展のお手伝いをしていたのですが、私も作ってみようかと。
https://github.com/RumiCar-group/RumiCar
▼ProtoPediaにも投稿しました。
https://protopedia.net/prototype/5030
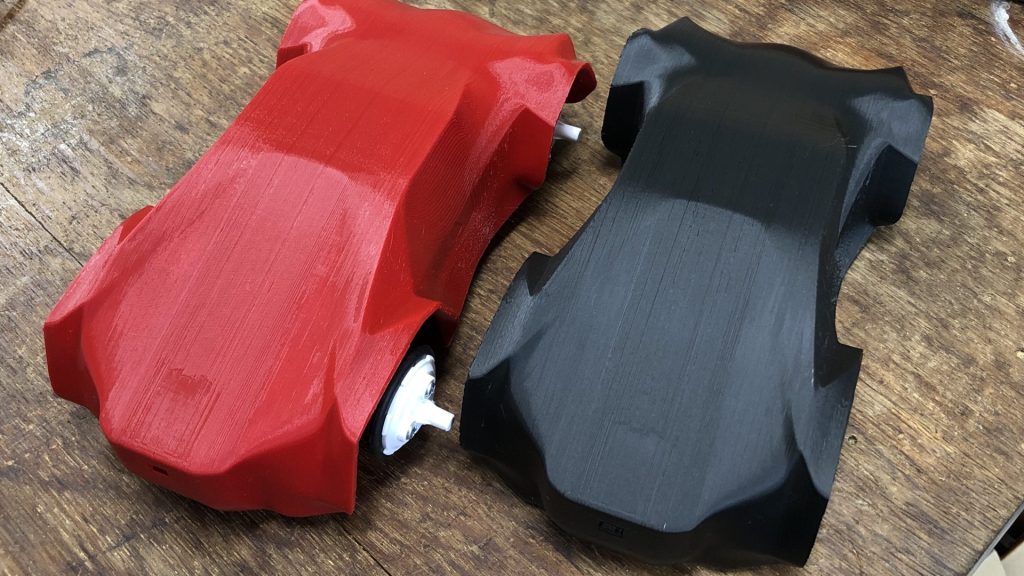
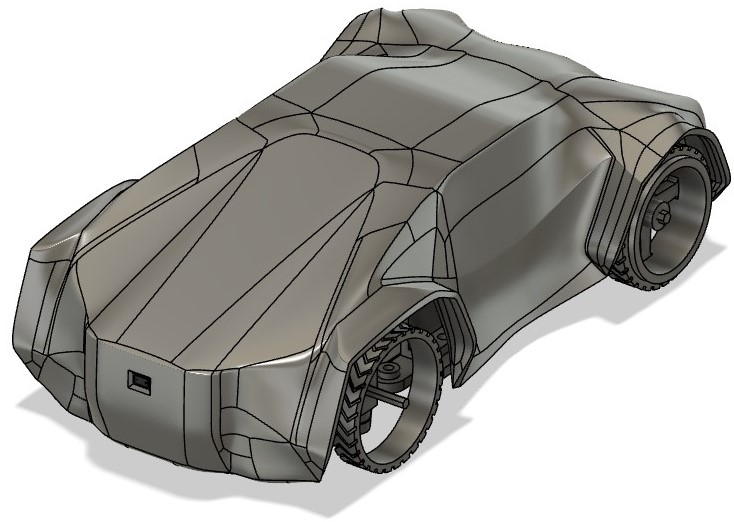
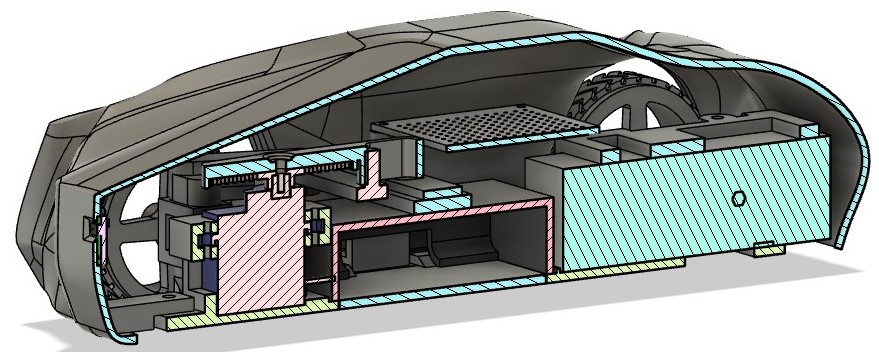
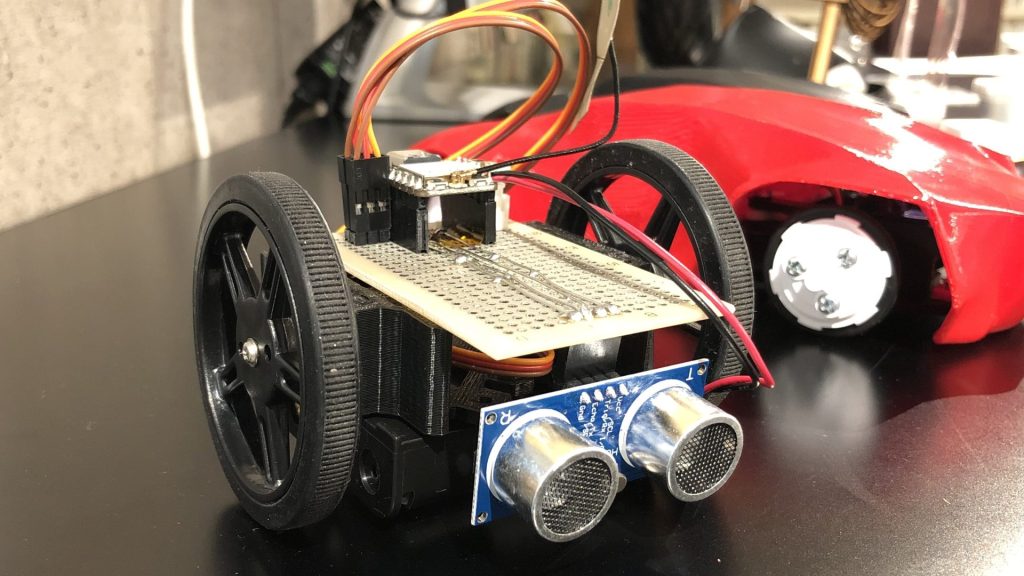
外観
3DプリンターはPrusa MK4、フィラメントはPLAフィラメントを使用しています。
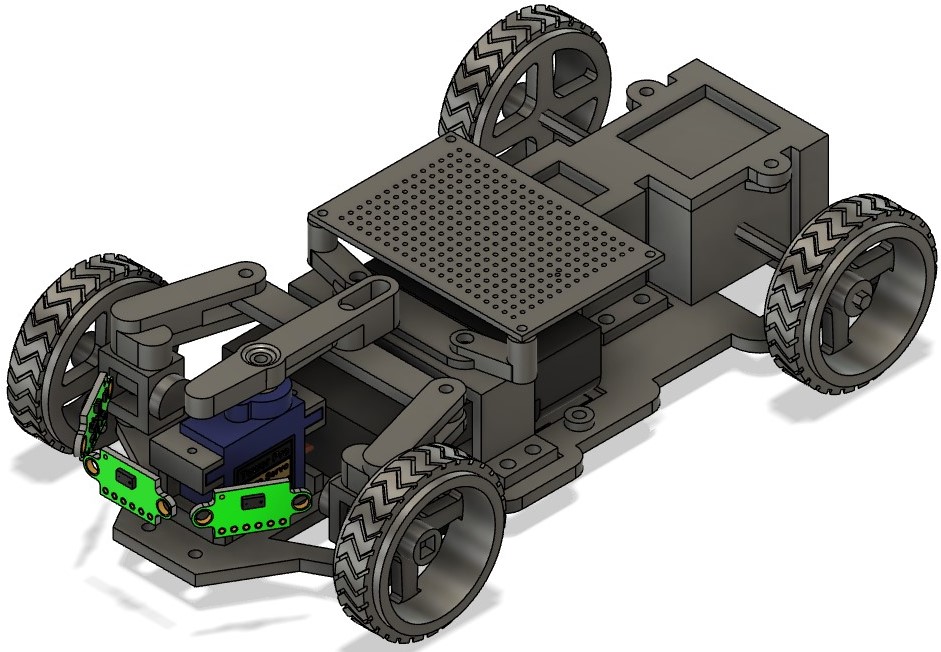
ステアリングの機構には、アッカーマン・ジャントー方式を取り入れてみました。サーボモーターで制御できます。

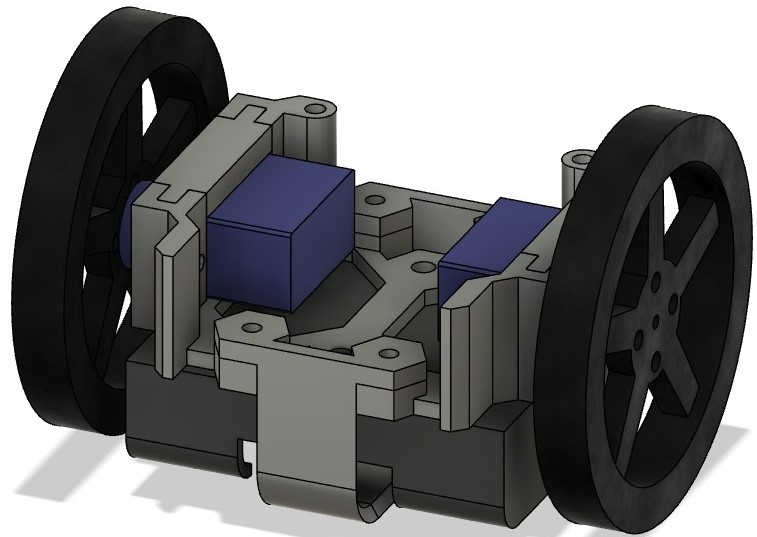
▼3DCADはFusion 360を使っています。フォームモデリングでデザインしてみました。
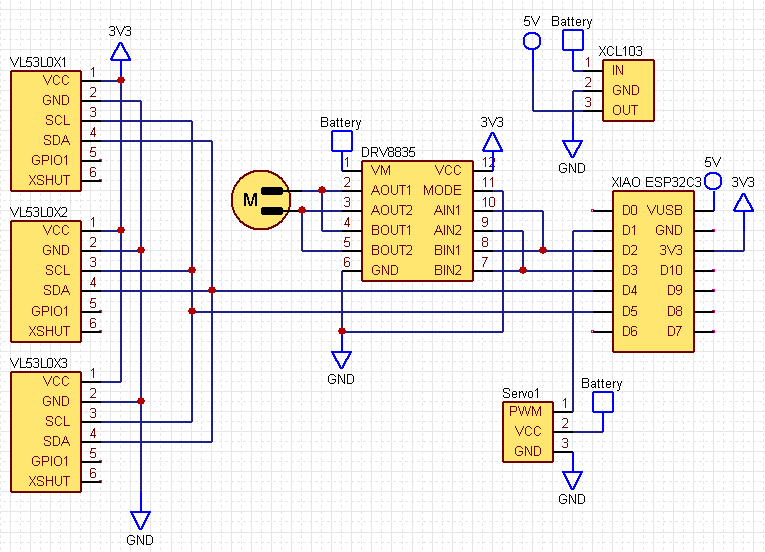
▼回路図はQuadceptで作成しています。基板も設計中です。
▼プログラムはこちら
動画
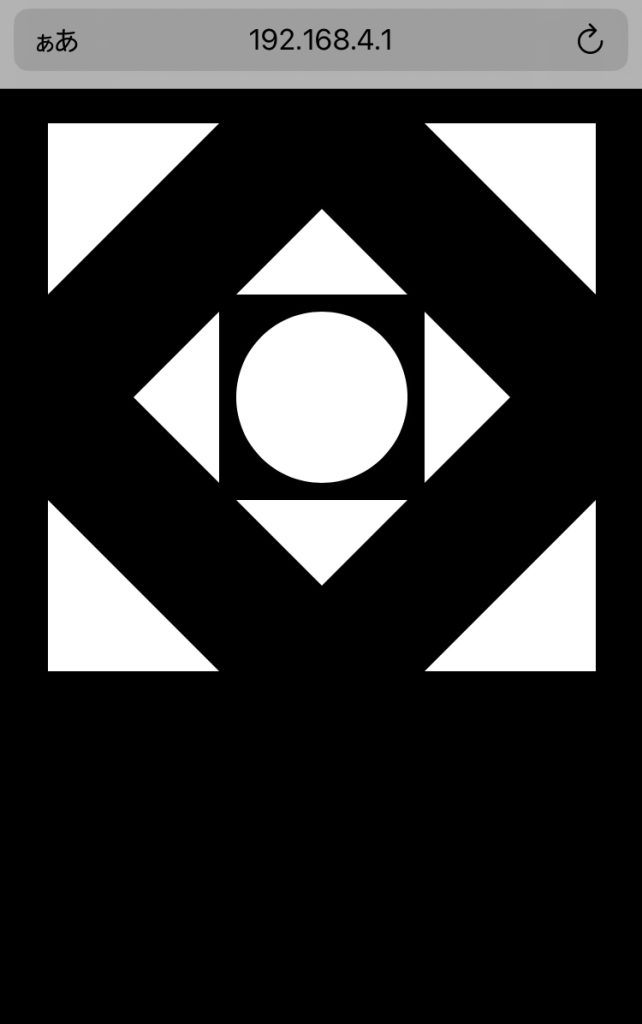
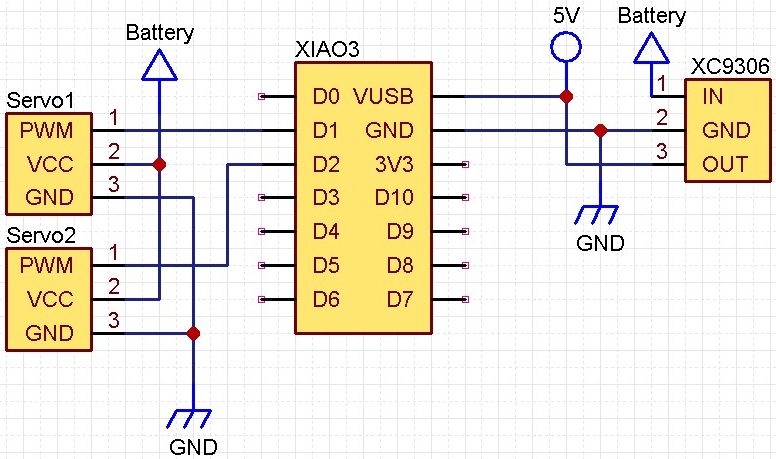
スマートフォンから操作できます。マイコンのXIAO ESP32C3をWiFiのアクセスポイントにして、ブラウザから入力できるようにプログラムしました。
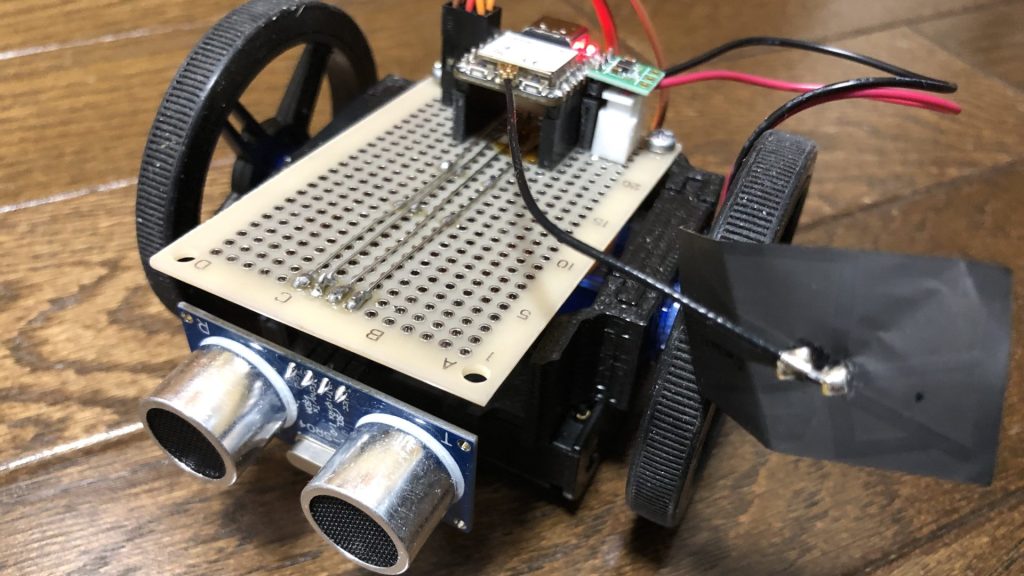
測距センサーを追加して、衝突を回避できるようにする予定です。
関連記事
Prusa MK 4を使ってみる(3Dプリンター)
はじめに ついに念願のマイ3Dプリンターを購入しました!Prusa MK4! 知り合いの方からPrusaの話を聞いていたのですが、Maker Faire Kyoto 2023のときに実物を見るこ…

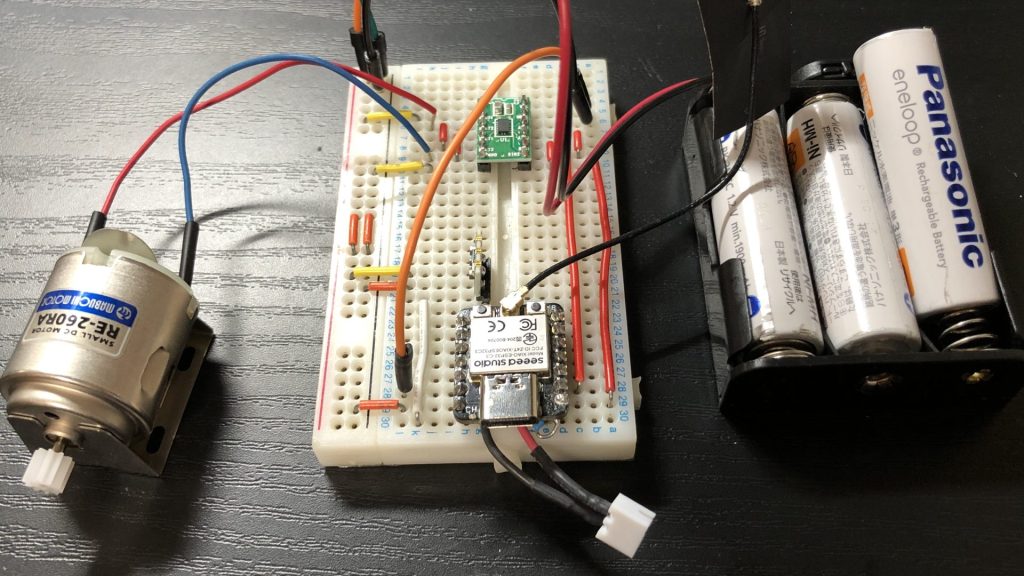
モータードライバーを使ってモーターを制御する その2(DRV8835)
はじめに 今回はモータードライバーのDRV8835を使ってみました。普段からよく使っているTB6612FNGとは制御方法が異なります。基板の大きさがこちらのほうが小さいですね…
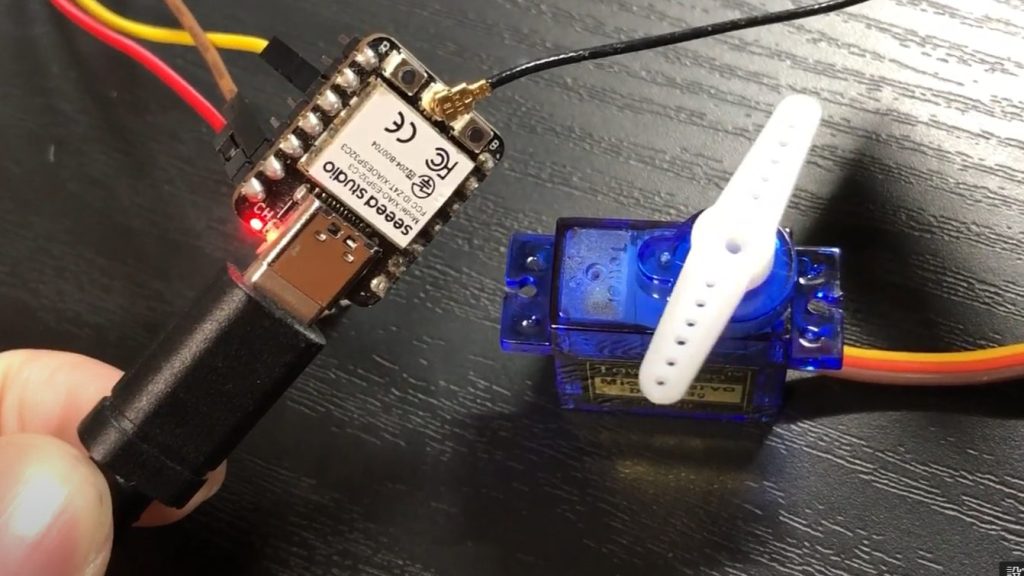
XIAO ESP32C3を使ってみる その2(analogWrite関数、サーボモーター)
はじめに 今回はXIAO ESP32C3で、analogWrite関数とサーボモーターの制御を試してみました。 サーボモーターについては、既存のライブラリが使えませんでした。そこで…
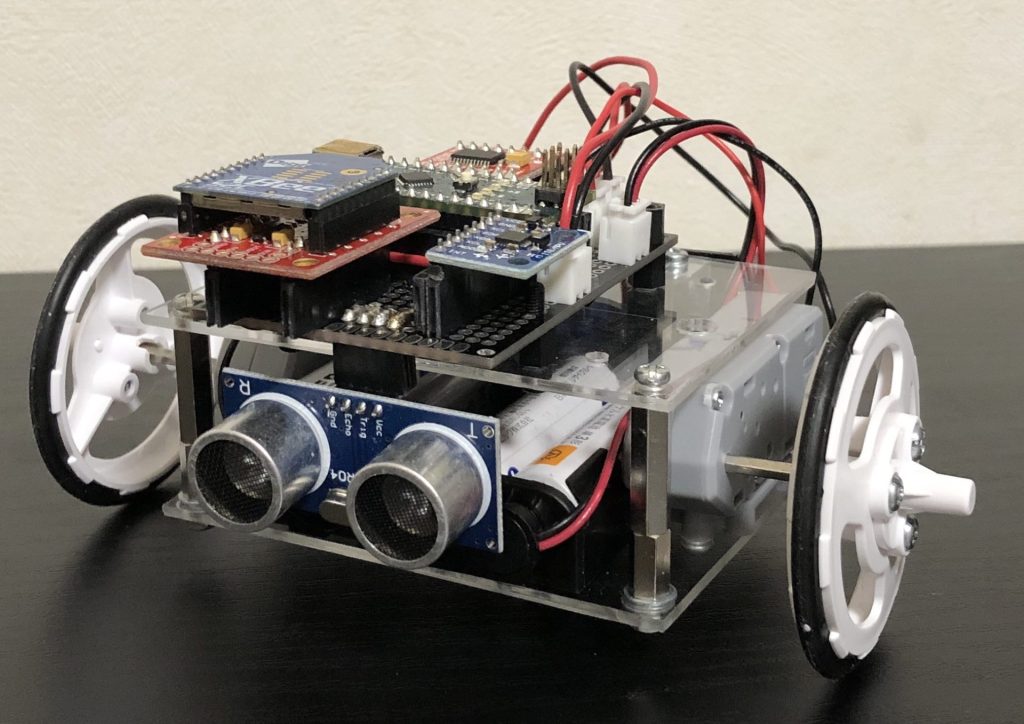
コマゴマ四号
一機当たり3,000円程に抑えて、量産できるように設計してみました。
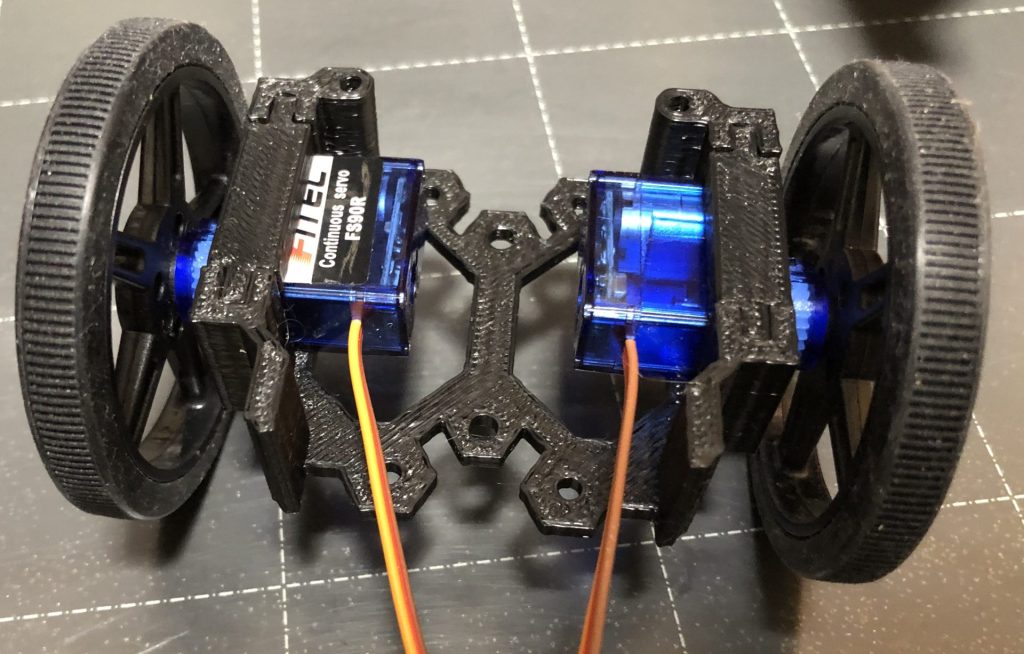
連続回転サーボ、電池、基板を固定する、最小限の構成です。
外観

▼ボランティアのイベントに持って行き、子どもたちに操作を体験してもらいました。



▼回路図はこちら
▼プログラムはこちら
動画
こちらもスマートフォンから操作できます。
関連記事
XIAO ESP32C3を使ってみる その4(WiFi AccessPoint、二輪ロボット)
はじめに 今回はXIAO ESP32C3をWiFiのアクセスポイントにして、ブラウザから操作できるようにしてみました。 そもそもなぜこの機能を試したのかというと、展示会やイ…
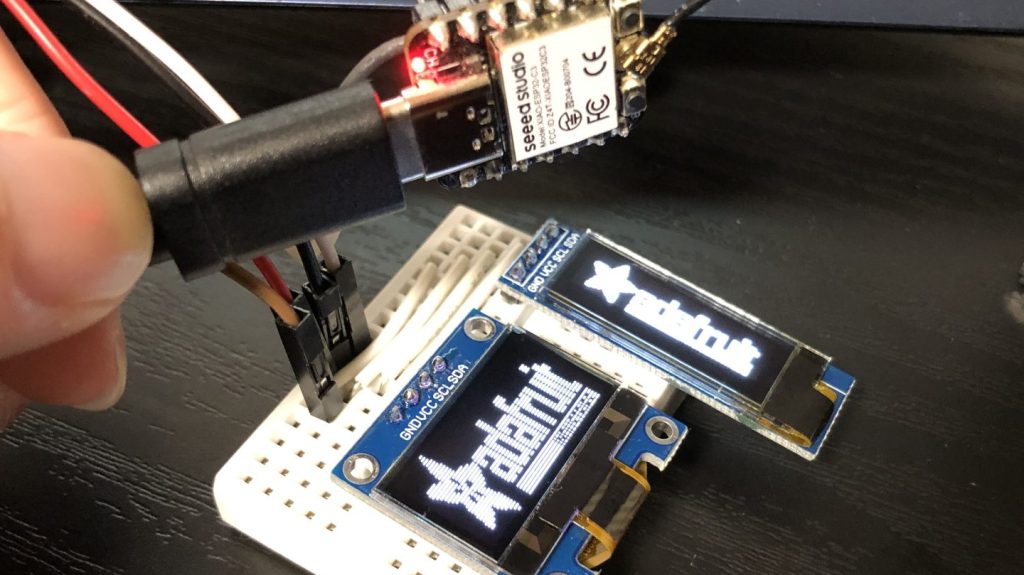
XIAO ESP32C3を使ってみる その3(OLEDディスプレイ、連続回転サーボ)
はじめに 今回はXIAO ESP32C3で、OLEDディスプレイと連続回転サーボを制御してみました。小型のマイコンには小型のディスプレイを一緒に使いたくなります。 OLEDディ…
コマゴマ二号関連
ここでは「コマゴマ二号」関連の情報を集めています。 Maker Faire Kyoto 2023に持って行ったものです。なんか虫っぽい... 外観 動作 関連記事

接続手順
1.電池を入れてください。私がいないときは、安全のため外しております。
2.スマートフォンのWiFiの設定画面に、アクセスポイントの名前が表示されます。
RumiCar-C3、komagoma-4にしています。
3.パスワードを入力してください。「12345678」にしています。
4.ブラウザから、http://192.168.4.1にアクセスしてください。操作画面が表示されます。