YDLIDAR X4 Proを使ってみる その2(ミニPC、Linuxでの動作確認)
はじめに
今回はLinux環境でYDLIDAR X4 Proの動作確認を行いました。
前回はWindows環境でしたが、ロボットに搭載するPCがLinux環境のミニPCなので、その環境での動作確認です。
▼Windows環境では以下の記事で試しました。
YDLIDAR X4 Proを使ってみる その1(Windows、GUIアプリでの動作確認)
はじめに 今回はLiDARを購入したので、動作確認を行ってみました。 LiDARは他の安価なセンサーに比べると高額で、搭載できるロボットがなかったので触っていなかった…

▼YDLIDAR X4 Proの販売ページはこちら


▼以前の記事はこちら
Jetson Xavierを使ってみる その5(NoMachine、リモートデスクトップ接続)
はじめに 今回はNoMachineを利用して、PCからJetson Xavierへのリモートデスクトップ接続を試してみました。 これまでもリモートデスクトップ接続は色々試していたの…
ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
はじめに 最近WSL2でUbuntu環境を複数インストールできるようになったので、ROS2の環境を改めて構築してみました。 大学の研究でロボットの遠隔操作にも取り組み始め…
環境を構築する
実行環境の確認
以前Ubuntu 22.04をインストールしたミニPCを用います。
▼Ubuntuのインストールについてはこちら
USBメモリでミニPCにUbuntuをインストールする(Rufus)
はじめに 今回はUSBメモリでミニPCにUbuntuをインストールしてみました。 身近にUSBでWindowsとUbuntuを切り替えている方がいたので、できることは知っていました。た…

▼Ubuntu 22.04がインストールされています。
ミニPCとはGoogleのリモートデスクトップで接続しています。
▼リモートデスクトップ接続についてはこちら
Google Chromeのリモートデスクトップを試してみる
はじめに 今回はGoogle Chromeのリモートデスクトップを試してみました。 普段はノートPCを持ち運んで使っているのですが、よりGPUの処理性能が高いデスクトップPCに…

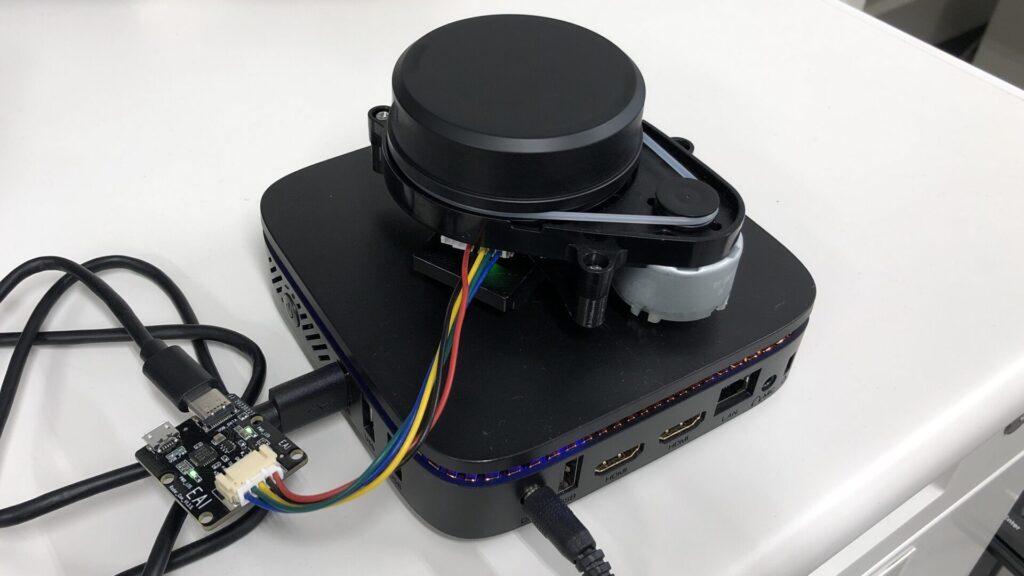
ミニPCとLiDARをUSBの変換基板で接続しました。
▼LiDARを上に載せられるようにすると、収まりが良さそうですね。
YDLidar-SDKのビルド
今回利用するLiDARはROSにも対応しているのですが、Pythonのシンプルなコードで利用できるようにしたかったので、そのためにビルドを行いました。
▼GitHubのビルドとインストールに関するページはこちら。
https://github.com/YDLIDAR/YDLidar-SDK/blob/master/doc/howto/how_to_build_and_install.md
コマンドを実行していくとエラーが起きていたのですが、その都度Geminiに相談しながら対処しました。まずは以下のコマンドを実行してみました。
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd YDLidar-SDK
mkdir build
cd build
cmake ..
make
sudo make install▼実行したところ、cmakeとmakeが見つからないというエラーが起きていました。
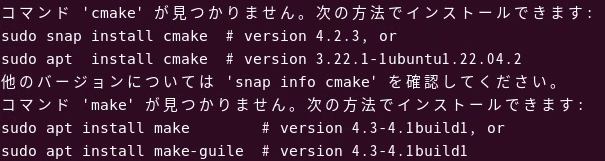
cmakeとmake、その他ビルドに必要なパッケージをaptでインストールしました。
sudo apt install cmake
sudo apt install make
sudo apt install build-essential
sudo apt install swig python3-dev python3-pip改めて先程のコマンドを実行したところ、最後まで処理が進みました。Pythonのビルドも行いました。
cd
cd YDLidar-SDK/
pip install .
python3 setup.py build
sudo python3 setup.py install▼問題なく進めば、ydlidarのパッケージがインストールされます。
動作を確認する
クローンしたリポジトリのpython/examplesフォルダにサンプルコードが入っていたのですが、実行するとエラーが起きていました。
▼以下のエラーです。
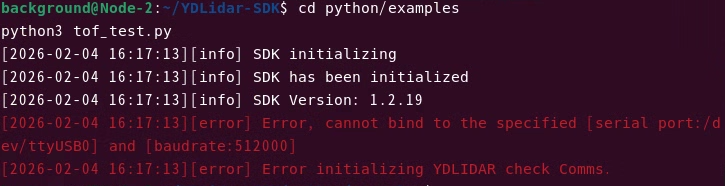
[error] Error, cannot bind to the specified [serial port:/dev/ttyUSB0] and [baudrate:512000]
[error] Error initializing YDLIDAR check Comms.USBデバイスは認識していました。
ls /dev/ttyUSB*
以前Windowsで動作確認をしたときは、Baudrateが128000でした。また、コードがX4 Pro用では無かったので修正する必要がありました。
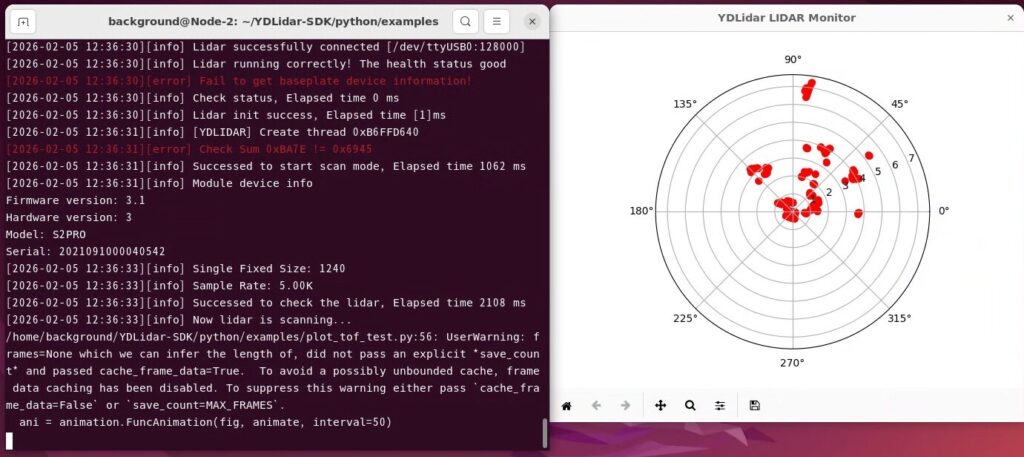
今回はplot_tof_test.pyというサンプルを修正して、動作するか確認しました。LiDARのスキャン結果をもとにプロットするサンプルです。
pip install numpy
pip install matplotlib
python3 plot_tof_test.pyまず実行した時点で、プロットに関するfig.canvas.set_window_titleの部分でエラーが起きていました。
▼以下の部分です。
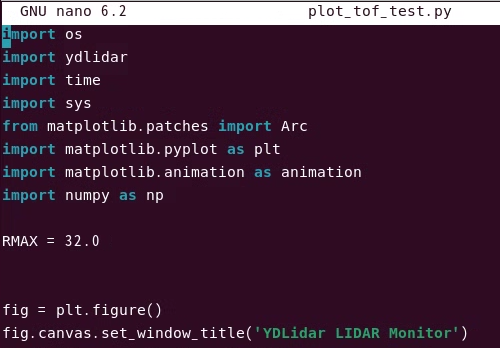
fig.canvas.set_window_titleをfig.canvas.manager.set_window_titleに変更して、LiDARのパラメータはX4 Proに合わせて修正しました。
▼以下の部分を修正しました。
# --- 修正前 ---
# laser.setlidaropt(ydlidar.LidarPropSerialBaudrate, 512000)
# laser.setlidaropt(ydlidar.LidarPropLidarType, ydlidar.TYPE_TOF);
# laser.setlidaropt(ydlidar.LidarPropSampleRate, 20);
# laser.setlidaropt(ydlidar.LidarPropSingleChannel, False);
# --- 修正後 ---
laser.setlidaropt(ydlidar.LidarPropSerialBaudrate, 128000)
laser.setlidaropt(ydlidar.LidarPropLidarType, ydlidar.TYPE_TRIANGLE)
laser.setlidaropt(ydlidar.LidarPropSampleRate, 5)
laser.setlidaropt(ydlidar.LidarPropSingleChannel, True)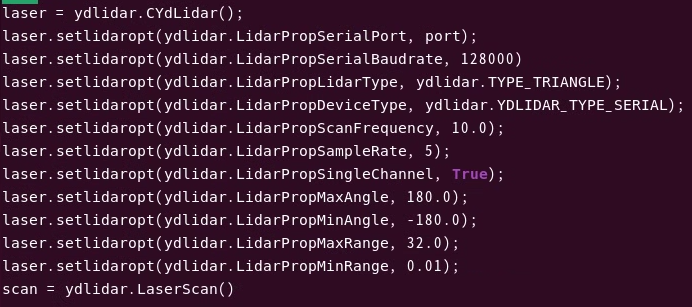
特に、LidarPropSingleChannelをTrueにしないとエラーが起きていました。
再度コードを実行してみました。
▼LiDARのデータを取得し、プロットすることができました!
最終的に、以下のコードで動作確認ができました。
import os
import ydlidar
import time
import sys
from matplotlib.patches import Arc
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import numpy as np
RMAX = 32.0
fig = plt.figure()
fig.canvas.manager.set_window_title('YDLidar LIDAR Monitor')
lidar_polar = plt.subplot(polar=True)
lidar_polar.autoscale_view(True,True,True)
lidar_polar.set_rmax(RMAX)
lidar_polar.grid(True)
ports = ydlidar.lidarPortList();
port = "/dev/ydlidar";
for key, value in ports.items():
port = value;
laser = ydlidar.CYdLidar();
laser.setlidaropt(ydlidar.LidarPropSerialPort, port);
laser.setlidaropt(ydlidar.LidarPropSerialBaudrate, 128000)
laser.setlidaropt(ydlidar.LidarPropLidarType, ydlidar.TYPE_TRIANGLE);
laser.setlidaropt(ydlidar.LidarPropDeviceType, ydlidar.YDLIDAR_TYPE_SERIAL);
laser.setlidaropt(ydlidar.LidarPropScanFrequency, 10.0);
laser.setlidaropt(ydlidar.LidarPropSampleRate, 5);
laser.setlidaropt(ydlidar.LidarPropSingleChannel, True);
laser.setlidaropt(ydlidar.LidarPropMaxAngle, 180.0);
laser.setlidaropt(ydlidar.LidarPropMinAngle, -180.0);
laser.setlidaropt(ydlidar.LidarPropMaxRange, 32.0);
laser.setlidaropt(ydlidar.LidarPropMinRange, 0.01);
scan = ydlidar.LaserScan()
def animate(num):
r = laser.doProcessSimple(scan);
if r:
angle = []
ran = []
intensity = []
for point in scan.points:
angle.append(point.angle);
ran.append(point.range);
intensity.append(point.intensity);
lidar_polar.clear()
lidar_polar.scatter(angle, ran, c=intensity, cmap='hsv', alpha=0.95)
ret = laser.initialize();
if ret:
ret = laser.turnOn();
if ret:
ani = animation.FuncAnimation(fig, animate, interval=50)
plt.show()
laser.turnOff();
laser.disconnecting();
plt.close();コードの改良
動作確認ができたコードをもとに、Geminiにコードを改良してもらいました。プロットの点が大きかったので小さくすること、UDP通信で別のPCでもデータを受信できるようにすることを要望として伝えました。
import os
import ydlidar
import time
import sys
import socket
import json
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import numpy as np
# --- 通信設定 (受信するPCのIPに合わせて変更してください) ---
UDP_IP = "localhost" # 例: 受信側のPCのIPアドレス
UDP_PORT = 5005 # 受信側のポート番号
# --- LiDAR設定 ---
RMAX = 12.0 # 表示する最大距離 (m) X4 Pro/S2 Proに合わせて調整
SCAN_FREQ = 10.0 # スキャン周波数 (Hz) : 高速化
SAMPLE_RATE = 5 # サンプルレート (K)
# ソケットの準備
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# グラフの初期設定
fig = plt.figure(figsize=(8, 8))
fig.canvas.manager.set_window_title('YDLidar X4/S2 Pro Monitor & UDP Sender')
lidar_polar = plt.subplot(polar=True)
lidar_polar.autoscale_view(True, True, True)
lidar_polar.set_rmax(RMAX)
lidar_polar.grid(True)
# LiDARポートの検索と設定
ports = ydlidar.lidarPortList()
port = "/dev/ttyUSB0"
laser = ydlidar.CYdLidar()
laser.setlidaropt(ydlidar.LidarPropSerialPort, port)
laser.setlidaropt(ydlidar.LidarPropSerialBaudrate, 128000)
laser.setlidaropt(ydlidar.LidarPropLidarType, ydlidar.TYPE_TRIANGLE)
laser.setlidaropt(ydlidar.LidarPropDeviceType, ydlidar.YDLIDAR_TYPE_SERIAL)
# --- スペックに合わせた高速化設定 ---
laser.setlidaropt(ydlidar.LidarPropScanFrequency, SCAN_FREQ)
laser.setlidaropt(ydlidar.LidarPropSampleRate, SAMPLE_RATE)
laser.setlidaropt(ydlidar.LidarPropSingleChannel, True) # 重要
laser.setlidaropt(ydlidar.LidarPropMaxAngle, 180.0)
laser.setlidaropt(ydlidar.LidarPropMinAngle, -180.0)
laser.setlidaropt(ydlidar.LidarPropMaxRange, 16.0)
laser.setlidaropt(ydlidar.LidarPropMinRange, 0.05)
scan = ydlidar.LaserScan()
def animate(num):
r = laser.doProcessSimple(scan)
if r:
angle = []
ran = []
intensity = []
# 送信用データリスト (JSON用)
# データ量を減らすため、距離が0の点は除外しても良い
export_points = []
for point in scan.points:
# プロット用データ
angle.append(point.angle)
ran.append(point.range)
intensity.append(point.intensity)
# UDP送信用データの作成
# フォーマット: [角度(rad), 距離(m), 強度]
# 通信量削減のため小数点以下3桁に丸める
if point.range > 0:
export_points.append([
round(point.angle, 3),
round(point.range, 3),
int(point.intensity)
])
# --- 1. プロットの更新 ---
lidar_polar.clear()
lidar_polar.set_rmax(RMAX)
lidar_polar.grid(True)
# s=2.0 で点を小さくし、高密度でも見やすくする
lidar_polar.scatter(angle, ran, c=intensity, cmap='hsv', s=2.0, alpha=0.8)
# --- 2. UDP送信処理 ---
try:
# タイムスタンプと点群データをJSON化
payload = {
"t": time.time(), # タイムスタンプ
"c": len(export_points), # 点の数
"d": export_points # データ本体 [[ang, dist, int], ...]
}
json_data = json.dumps(payload).encode('utf-8')
# データサイズが大きすぎる場合は警告 (UDPパケット制限への配慮)
if len(json_data) > 60000:
print(f"Warning: Payload size {len(json_data)} bytes is too large for UDP.")
else:
sock.sendto(json_data, (UDP_IP, UDP_PORT))
except Exception as e:
print(f"UDP Send Error: {e}")
ret = laser.initialize()
if ret:
ret = laser.turnOn()
if ret:
# intervalを短くして描画更新を速くする
ani = animation.FuncAnimation(fig, animate, interval=10)
plt.show()
laser.turnOff()
laser.disconnecting()
plt.close()UDP通信で送られるデータ形式は以下のようになります。
{
"t": 1707103500.123, // タイムスタンプ (UNIX time)
"c": 405, // 点群の数 (Count)
"d": [ // データ配列 (Data)
[ -3.141, 2.501, 10 ], // [ 角度(ラジアン), 距離(メートル), 強度 ]
[ -3.120, 2.505, 12 ],
...
]
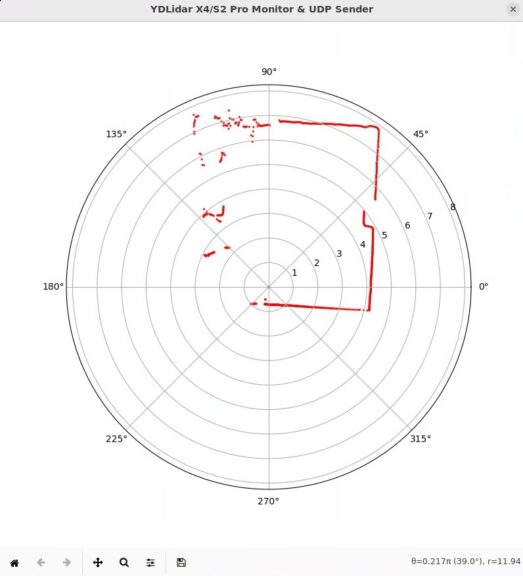
}実際にコードを実行してみました。
▼先程よりも小さな点でプロットされました。
TailscaleのVPN接続でつながっているJetson XavierのNode-REDで、データを受信できているか確認してみました。
▼Jetson Xavierの環境についてはこちらの記事で構築しています。
Jetson Xavierを使ってみる その2(通信周りの設定、Node-RED、TailScale)
はじめに 今回は以前OSのセットアップを行ったJetson Xavierの通信周りの設定を行いました。 自宅サーバーとして使いたかったので、外部のネットワークからでもアクセ…
▼データが受信できることを確認しました。
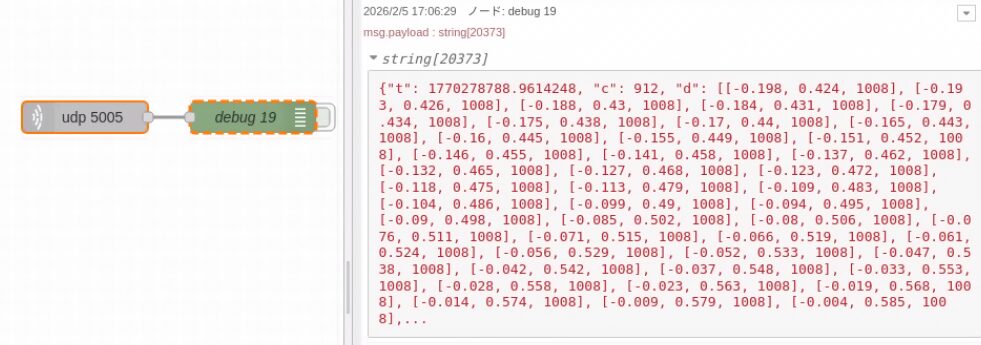
コードを実行したタイミングでLiDARの回転速度が遅くなった気がしたのですが、周期などは用途に応じて調整しようかなと思っています。
最後に
Linux環境でもYDLIDAR X4 Proの動作を確認することができました。
実際に移動ロボットに搭載して、衝突を避けたり、マップを作成したりしたいなと思っています。
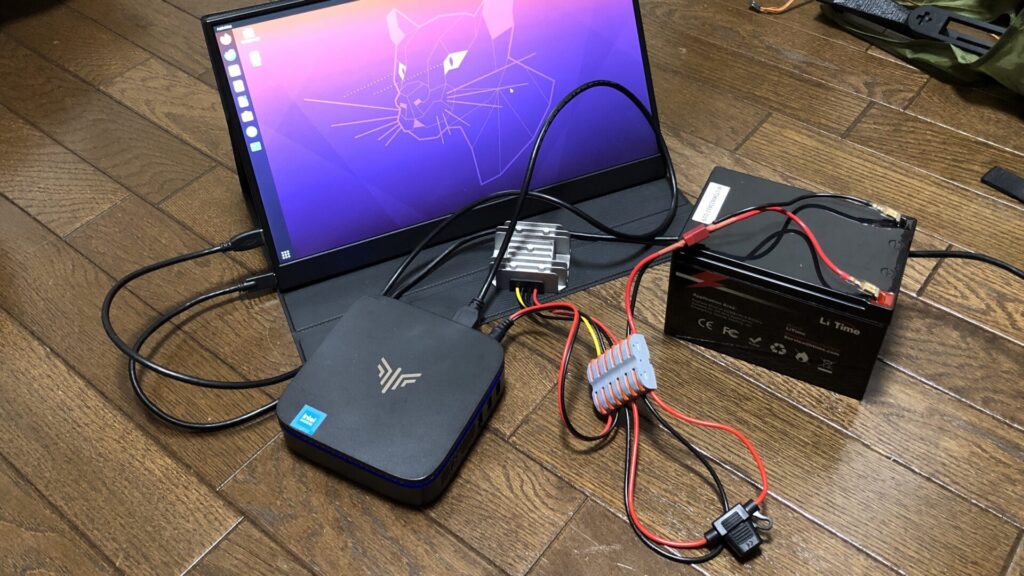
▼バッテリーでミニPCに給電できることは確認済みなので、LiDARも含めロボットに搭載できそうです。
リン酸鉄リチウムイオンバッテリーを使ってみる その2(ミニPCへの電源供給、LiTime 12V12Ah LiFePO4)
はじめに 今回は以前購入したリン酸鉄リチウムイオンバッテリーを使って、ミニPCへの電源供給ができないか試してみました。 普段はACアダプタでDC12Vに変換して供給し…