
YDLIDAR X4 Proを使ってみる その1(Windows、GUIアプリでの動作確認)
はじめに
今回はLiDARを購入したので、動作確認を行ってみました。
LiDARは他の安価なセンサーに比べると高額で、搭載できるロボットがなかったので触っていなかったのですが、設計中の移動ロボットに搭載できそうだったので購入しました。ひとまずロボットに搭載して、衝突を避けられるようにしたいなと思っています。
▼以前の記事はこちら
距離センサーを使ってみる その1(VL53L0X)
はじめに 今回は距離センサーのVL53L0Xを使ってみました。自動運転アルゴリズム開発プラットフォームのRumiCarでも使われていたものです。 ▼RumiCarのリポジトリはこち…

Unreal Engine 5を使ってみる その16(測距センサーを用いた簡易的なスキャン、Node-RED)
はじめに 今回は測距センサーを利用してLiDARのようにスキャンできないかな?と思ったので、まずはUnreal Engine 5 (UE5) のシミュレーション環境で試してみました。 …
購入したもの
Switch Scienceで購入しました。
▼こちらを購入しました。

▼一応ちょっと安い値段でAmazonでも販売されているようです。

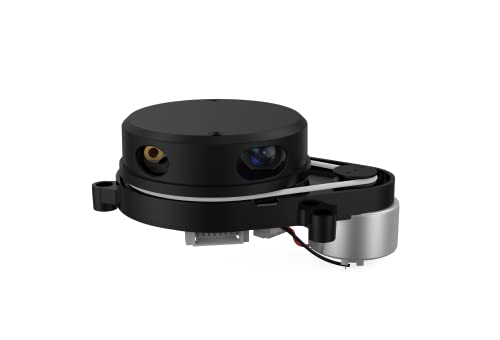
▼開封するとこんな感じ。

▼販売ページの画像には無かったのですが、スペーサがついていました。

▼シリアル変換機は信号用と補助電源用で分かれています。
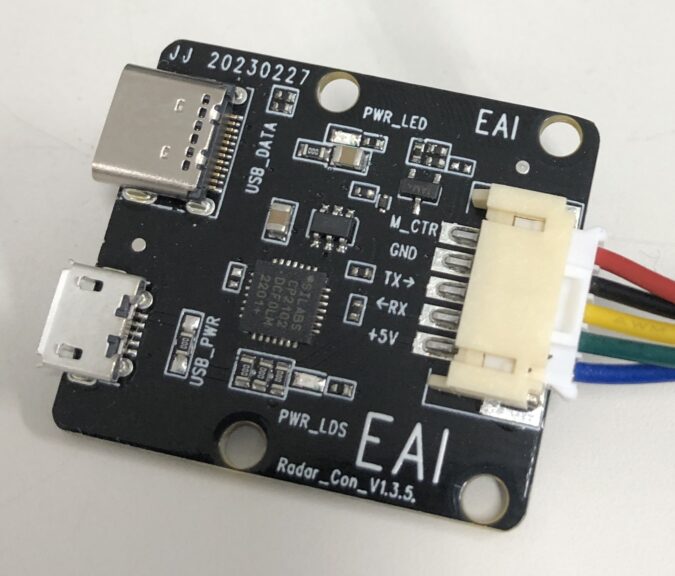
通信と給電を兼ねているとLiDARへの電源供給が不足する可能性があったのですが、補助電源も取れるので安定して使えそうです。
▼例えばRaspberry PiのUSBポートでは流せる電流が少ないので、セルフパワーに対応したハブを使ったりします。

GUIアプリで試してみる
▼ユーザーマニュアルを参考に進めます。
https://www.ydlidar.com/download/category/user-manual
LinuxでのROSとの接続などもできるようですが、今回はWindows 環境で動作確認を行いました。
▼PCは10万円ぐらいで購入したゲーミングノートPCを利用しています。Windows 11の環境です。
ちょっと買い物:新しいノートPCとSSDの増設(ASUS TUF Gaming A15)
はじめに 今回はこれまで使っていたPCが壊れたので買い替えましたという話です。 以前はよく分からないGPUが載っていたノートPCを使っていたのですが、最近はUnreal E…


Toolのページから、EaiLidarTest-V1.12.6-20250612をダウンロードしました。
▼こちらのページからダウンロードしました。
https://www.ydlidar.com/download/category/lidar-sensor
ダウンロードしたものに入っていた実行ファイルを実行しました。
▼GUIアプリが起動しました。
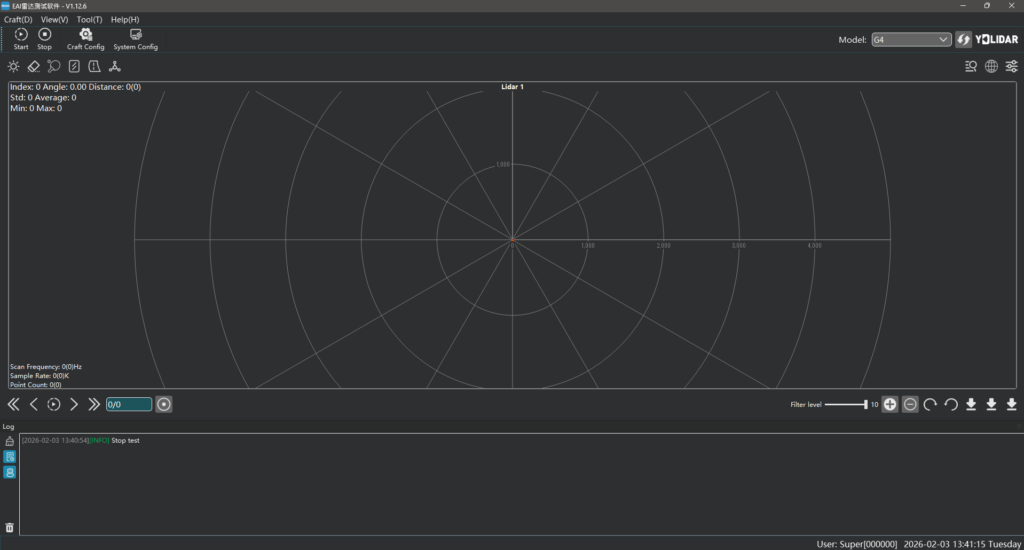
左上にStartボタンがあるのですが、このままではX4 Proとの接続ができていないようでした。デフォルトではモデルがG4になっていたので、System Configから変更しました。なお、右上のモデルのプルダウンは選択できない?ようでした。
▼System Configで設定します。
▼X4-Proが一番上になるように順番を変更しました。
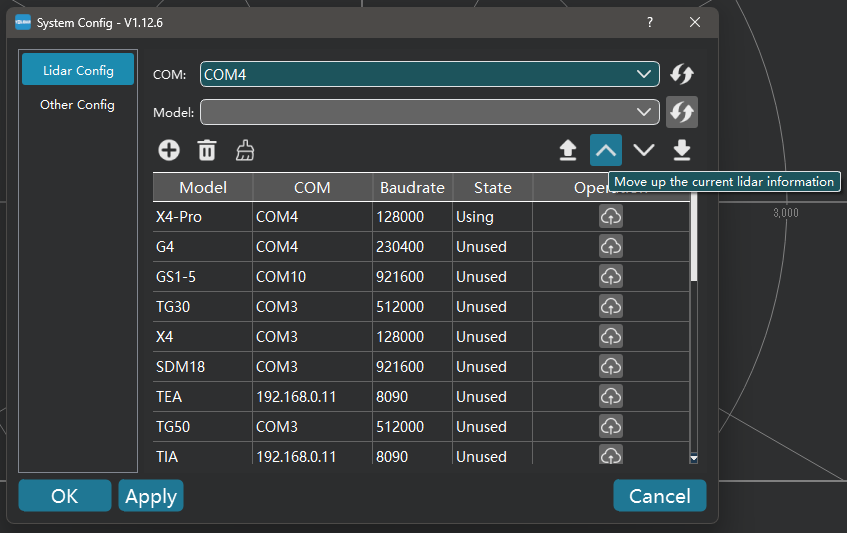
モデルをダブルクリックして選択し、COMポートも変更してOKを選択しました。
▼右上のモデルが、X4-Proになりました。
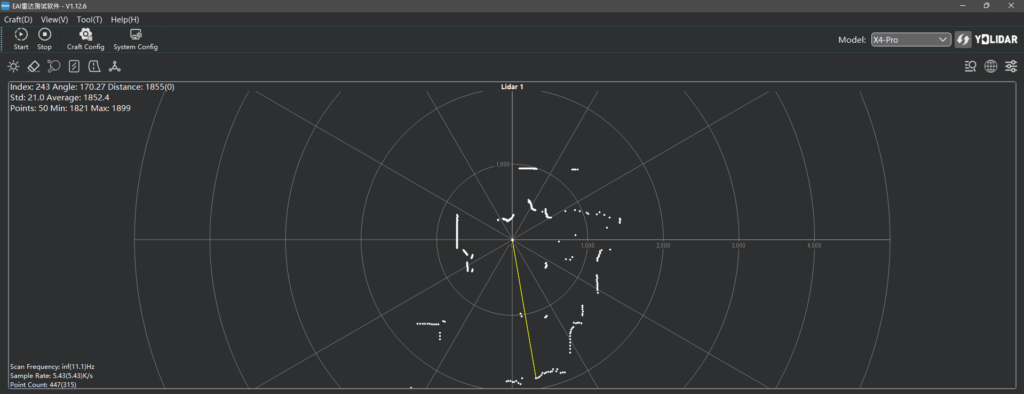
この状態でStartをクリックすると、データを取得できました。
▼点群データが得られました!
販売ページには計測範囲が0.12-10 mと書かれていたのですが、実際に100mm付近で検出されなくなるという感じでした。
▼これよりも近づくと検出されませんでした。
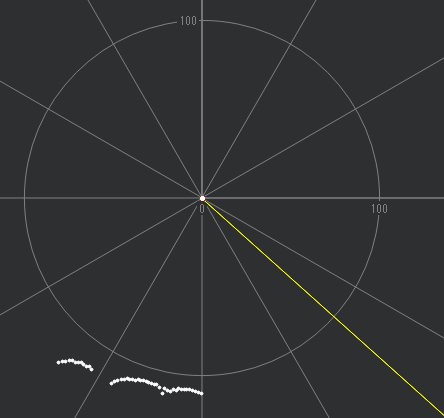
定規で測ってみると、LiDARの回転中心部からの距離になっているようでした。
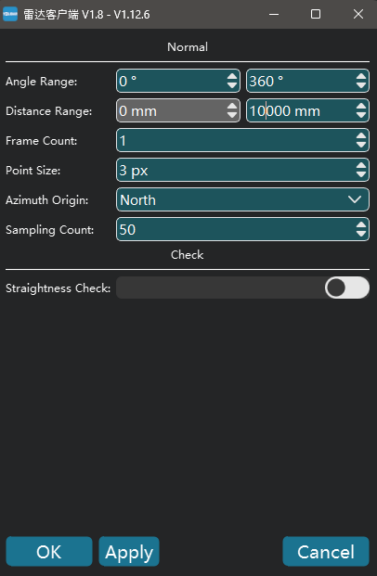
GUIアプリの表示範囲について、デフォルトではDistance Rangeが5000mmになっていたのですが、X4 Proは10mの範囲でスキャンできるはずだったので、変更しました。
▼Craft Configから変更しました。
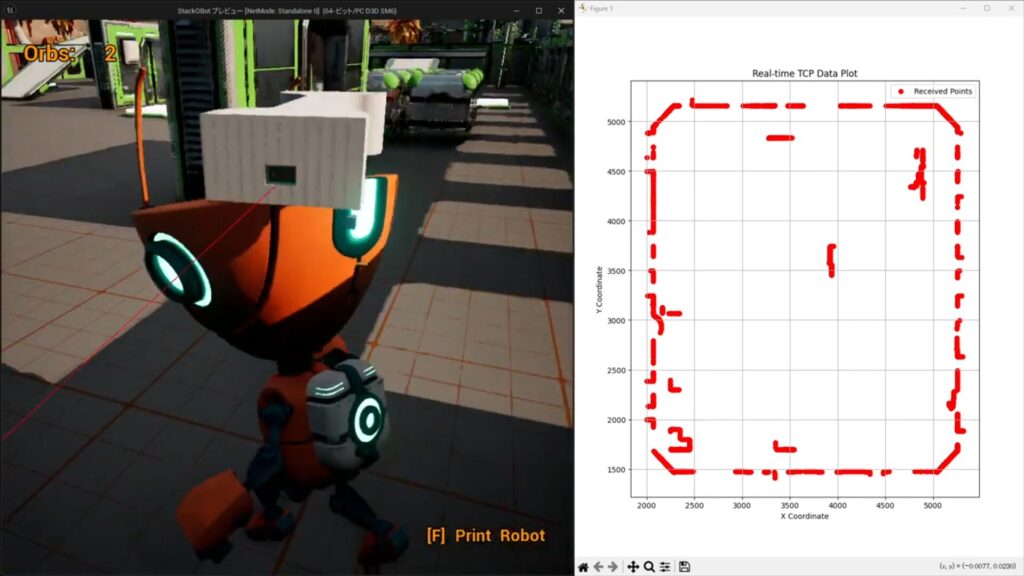
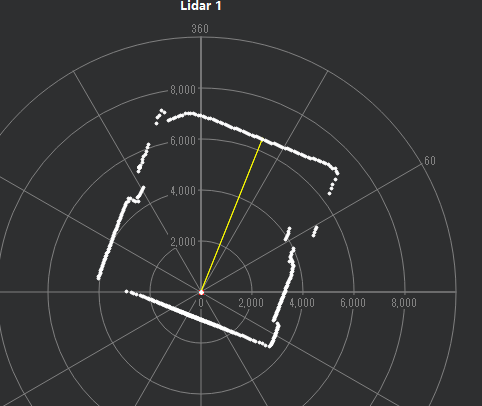
▼LiDARを障害物の少ない高い位置でスキャンさせると、大体部屋の外形を取得することができていました。
最後に
動作することは確認できたので、ロボットに搭載できるようにLinux環境でも動作確認をしようと思っています。
できればRaspberry Pi 3が余っているので使いたかったのですが、性能不足を感じ始めているのでミニPCを搭載してもいいなと考えています。
▼SLAMも試したいところです。


