
ポンプモジュールを使ってみる(チューブポンプ PP310-030、植物の水やり)
はじめに
去年の話ですが、学会でトマトの苗をもらって栽培を自動化しようと画策していました。
その一環でポンプモジュールも試していたので、今回はそのまとめです。自動化する前に枯れてしまったので、また育てることがあったら使いたいなと思っています。
▼以前の記事はこちら
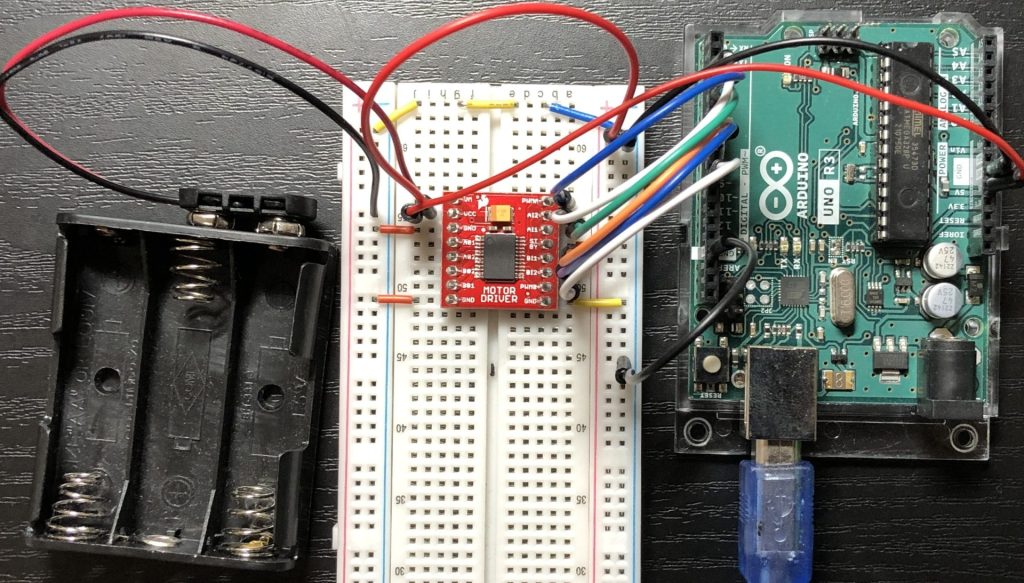
モータードライバーを使ってモーターを制御する その1(TB6612FNG)
はじめに 今回はデュアルモータードライバーのTB6612FNGを紹介します。これまで小型のロボットに散々使ってきましたが、改めての紹介です。 TAMIYA製品との相性が良く…
加速度センサーを使ってみる その1(MPU6050、ESP32、デュアルコア)
はじめに 今回は加速度センサーのMPU6050を使ってみました。いつも使っているスターターキットに入っていたものです。GY-521と印字されていますが、MPU6050と変わりませ…

部品の購入
今回は家庭で苗を育てる程度の小さな規模だったので、モバイルバッテリーでも駆動するぐらいの低電圧なポンプを探しました。
▼こちらのチューブポンプを購入しました。3Vで駆動します。
https://akizukidenshi.com/catalog/g/g117533
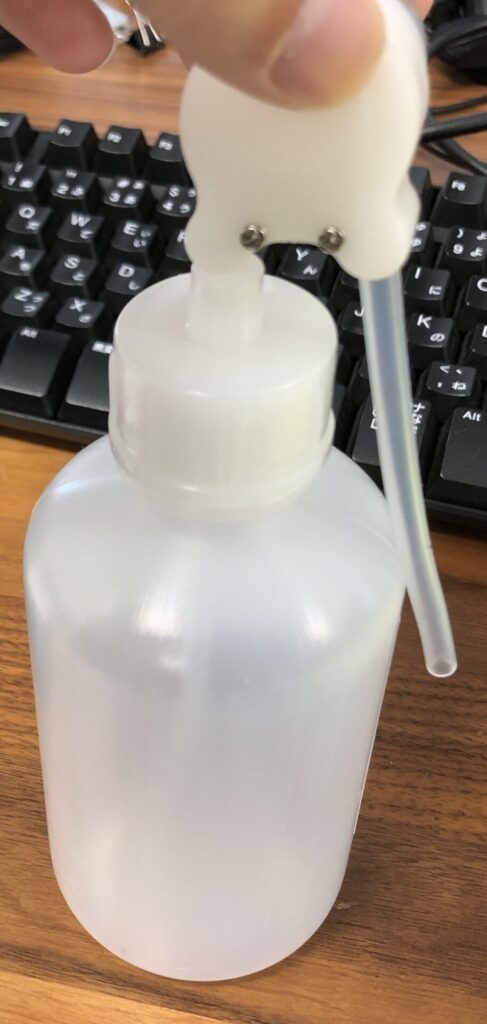
水を貯めておくためのボトルをコーナンで購入しました。
▼これと同じだと思います。

▼元々ついているノズルを外すと、チューブが入ります。

▼こんな感じで入ります。
チューブがボトルの底には届かなくて短かったので、ジョイントとチューブで延長しました。
▼こちらの部品を購入しました。

ポンプへの電力供給は、レギュレーターで3.3Vに降圧してから行うことにしました。
▼マイコンで制御することも考えて、ON/OFF機能付きの4端子レギュレータを購入しました。
https://akizukidenshi.com/catalog/g/g109261
回路を組む
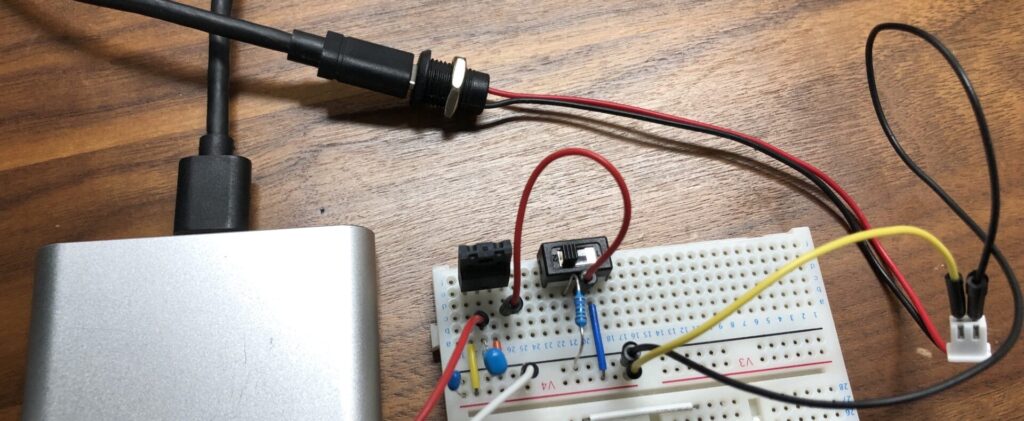
4端子レギュレータのデータシートをもとに回路を組みました。スライドスイッチでON/OFFを切り替えることができるようにしています。
▼こんな感じの配線です。
モバイルバッテリーはcheeroのIoT対応のものを利用しています。
▼小型のものを3Dプリンター部品で収納して使えるようにしていました。


▼Type-Cケーブルからの給電は以下のようなものを使っています。ボルトで固定できるので、取り付けも便利です。

動作を確認する
実際に動かしてみました。
▼ボトルの水を汲み上げることができています。
▼右側にある白い球でチューブが抜けないようにしているのかと思います。

▼チューブが動くので、右と左の長さが変わっていきます。

▼こんな感じで水やりをすることができました。ちなみに、苗を入れている黒いケースは3Dプリンターで作成しました。水を捨てやすいようにしています。

ポンプモジュールを手で支えていたので、この後3Dプリンターで固定するための部品を作成し、ユニバーサル基板で配線してまとめてみました。
▼手で支えなくても自立して使えるようになりました。
最後に
この後マイコンとRTCも利用して、決められた時間に水やりするように作成できました。
▼RTCについては以下の記事で動作を確認しています。
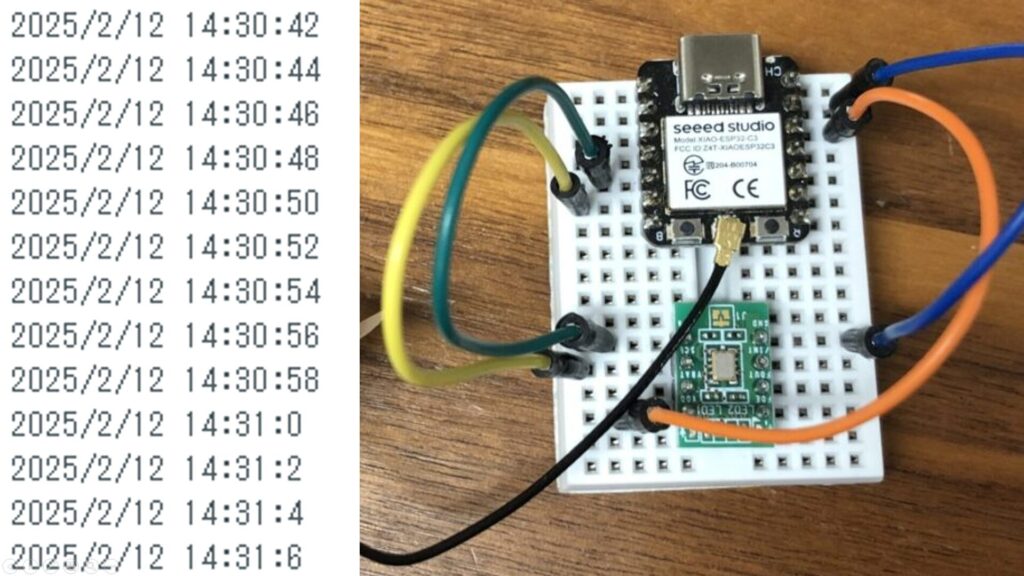
XIAO ESP32C3を使ってみる その7(RTC、ネットワークの時刻取得)
はじめに 今回はマイコンでRTCとネットワークを利用した時刻の取得について試してみました。 IoT用途として、水やりなどに使いたいなと思っています。 ▼家でトマトを…
また植物を育てることがあれば使いたいなと思っています。

