3Dプリンターで機構の設計 その2(TechSeeker Hackathon 2025)
はじめに
今回はTechSeeker Hackathon 2025というハッカソンで製作していたものについての紹介です。
1か月でハードウェアを製作するハッカソンで、2年前に参加したときは3Dプリンターが壊れたので、急遽レーザーカッターでの製作に切り替えました。
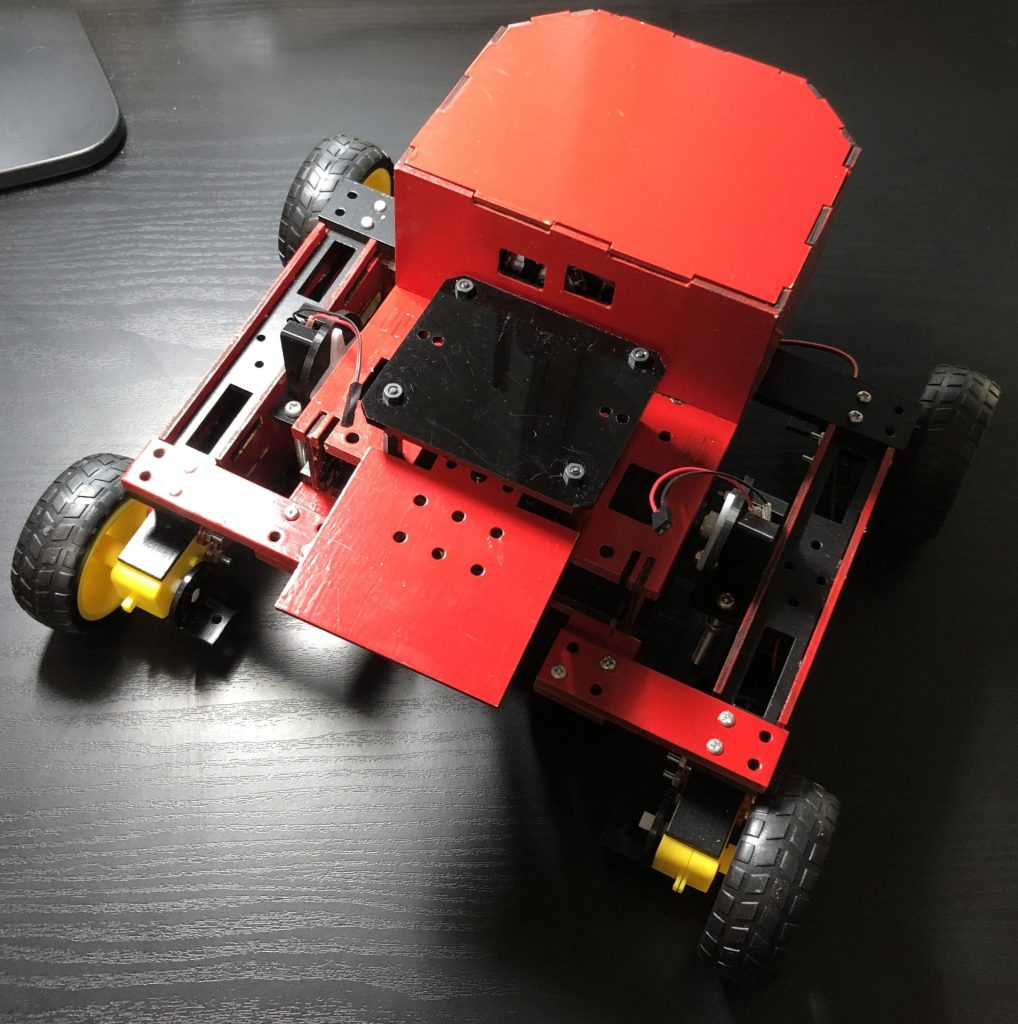
▼こちらのロボットを製作しました。
スマホを運ぶロボット関連
ここではTechSeeker Hackathon 2023にて製作した、スマホを運ぶロボットに関する情報を集めています。 外観 実際の動作 関連記事 ▼Protopediaのページ
今年は自宅の3Dプリンターを活用して、機構部品なども作りながら製作を進めました。その製作過程について紹介しようと思います。
▼Protopediaにも投稿されています。
https://protopedia.net/prototype/7089
▼会場でチームを組んだ方々と製作を進めました。

▼以前の記事はこちら
Jetson Xavierを使ってみる その1(JetPack 5.1.5のセットアップ)
はじめに 最近TechSeeker Hackathon 2025というハッカソンに参加しているのですが、参加者特典でJetson Xavierを1万円で購入できました。今回はそのセットアップをして…

5軸のロボットアームを製作する その1(キャチロボ2025、部品の選定、試作品の作成)
はじめに 毎年9月頃にキャチロボバトルコンテストというお菓子を運ぶロボコンがあって、私はこれまで大学の部活動で3年間参加していました。今年は後輩のサポートをしな…

初期案
テーマが「AIを使って魔法の道具を作ろう」というものだったので、開いたら魔法が発動するような球体を作ることになりました。
GoogleのImage FXという画像生成のサービスを使って、作りたいもののイメージを出力しながら話し合っていました。
▼Image FXについてはこちら
https://labs.google/fx/ja/tools/image-fx
▼色々話しあっているうちに花のようなイメージになりました。


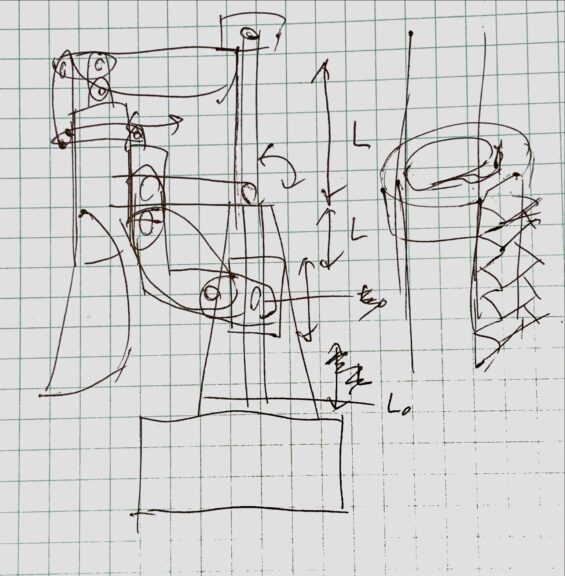
このイメージをもとに、簡単なスケッチを描きました。
▼とりあえず動きそうな構造を考えました。
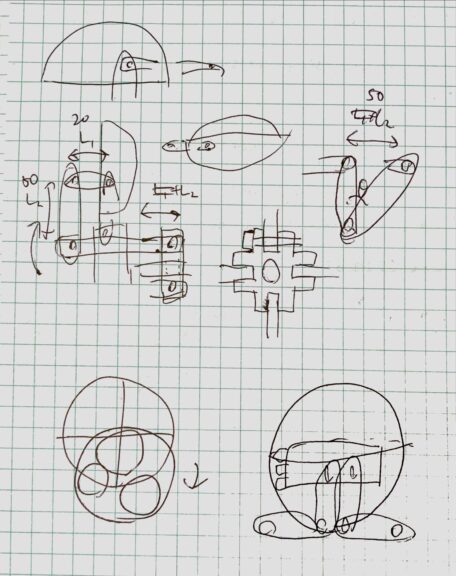
▼前回の記事で紹介していた機構が一部元になっています。
3Dプリンターで機構の設計 その1
はじめに 今年のTechSeeker Hackathon 2025にて、3Dプリンターで出力した機構部品を用いて製作しました。それよりも以前に小さい部品で試したことがあったので、今回は…

スケッチをもとに、Fusion 360で設計してみました。
▼最初に設計したものはこんな感じ。球体部分は直径が20cmぐらいあります。

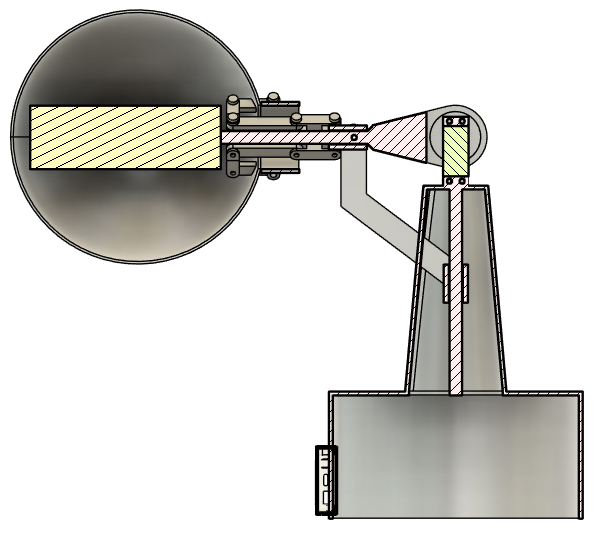
球体部分を作ったところ、思っていたよりも重かったので、向きを変更するモーターは今回は使わない方向で製作を進めました。
▼1か月しかなかったので、ひとまず開閉できる設計にすることにしました。
▼ちなみに、設計画像をImage FXに渡すと、こんな感じの魔法を出せそうな画像が生成されました。


試作してみる
実際に3Dプリンターで製作しながら、設計を進めていきました。
▼3DプリンターはPrusa MK4を使っています。
Prusa MK 4を使ってみる(3Dプリンター)
はじめに ついに念願のマイ3Dプリンターを購入しました!Prusa MK4! 知り合いの方からPrusaの話を聞いていたのですが、Maker Faire Kyoto 2023のときに実物を見るこ…

▼Prusa MK 4は在庫が無いようですが、MK4Sならあるようです。

3Dプリンターでジョイントやリンクを製作して、組み立てながら長さを調整しました。Prusa MK4の精度のおかげなのか、3DCAD上で隙間0に設計すると、ピッタリ嵌ります。
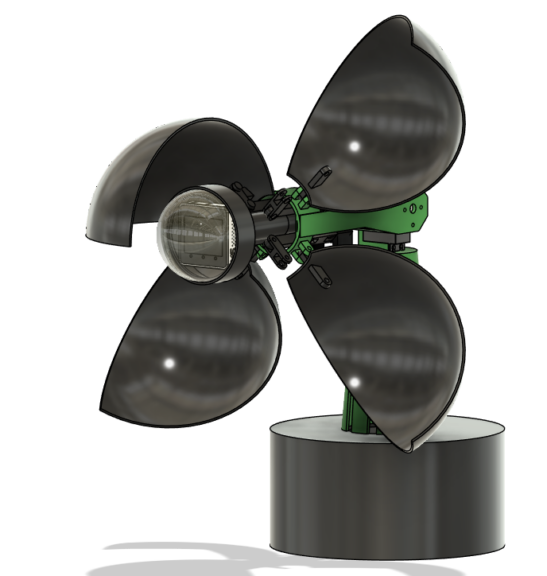
▼手で動かして、開閉できそうなことを確認しました。
▼手ではなくモーターで動かせるように、歯車の部品も3Dプリンターで製作しました。

なお開閉するだけならボールねじという選択肢もあるのですが、今回は高速に開閉したかったのでラックとピニオンのような機構にしています。
▼モーターでも開閉できることを確認しました。
モーターのトルクが大きくないと動かなかったので、元々移動ロボット用に使おうと思っていたモーターと、13A流せるモータードライバーで制御することにしました。この辺りは電気系の知識も必要ですね。
▼こちらのモーターとモータードライバーです。

https://akizukidenshi.com/catalog/g/g116286
▼モーターの電源は単三の充電池のエネループ8本からとっています

▼高速で開閉することができるようになりました。
球体の部品は厚さが2mmほどで、最初3Dプリンターで出力したときは接地面が少なくて途中から剥がれることがありました。
▼


▼内側のサポートを意図的に増やすと、剥がれずに出力できました。

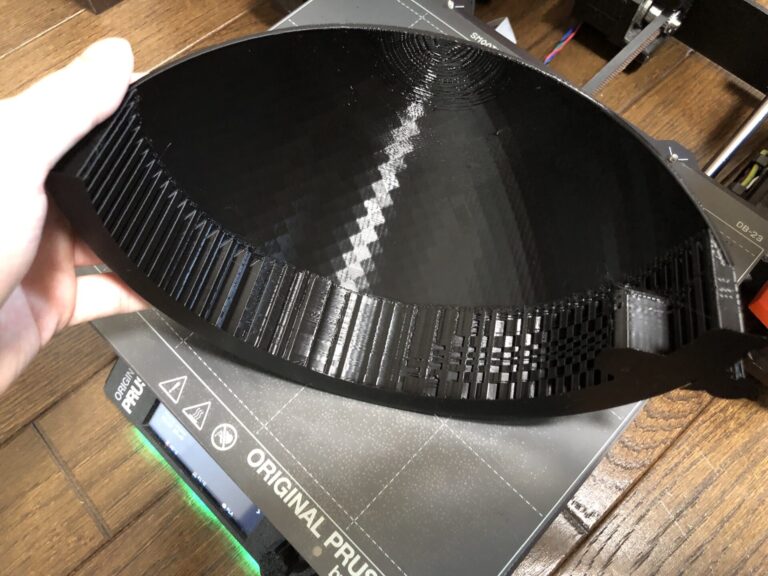
▼一番粗い設定だったのですが、光沢があって模様みたいになっていました。

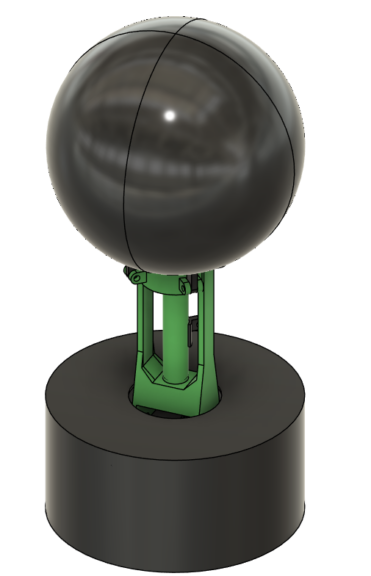
▼土台も付けたところ、底部のモーターが重いので安定して直立していました。
この後他のメンバーが製作していた電子基板などを収め、動作するようにしました。
3Dプリンター部品のインフィルはすべて5%で出力していたのでその内壊れるかなと思っていたのですが、意外と壊れずに使えていました。3Dプリンターに詳しい方によると、インフィルよりも外壁の厚さが大事ということを教えてもらいました。
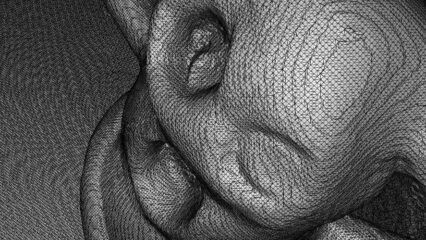
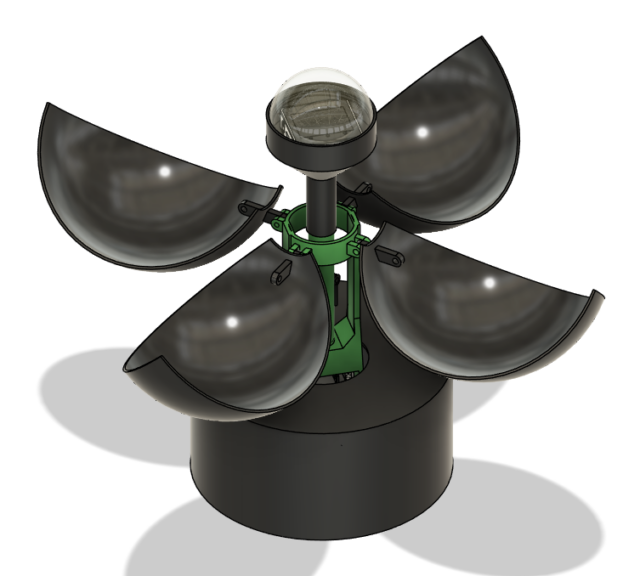
▼ちなみに、人の顔が収まるくらいの部品が結構な速度で閉じます。展示会で展示していると、食べられそうという意見もありました。

最後に
1か月のハッカソンに間に合うように、機構部品を設計することができました。歯車やジョイント、リンクなど、普段はしない設計を試してみて、意外と製作できることに気づいたので、今後も設計に取り入れていこうと思っています。
さらにRaspberry PiとM5Stackを搭載し、LEDやミストモジュールを追加しました。展示会の際に来場者の方に見てもらっていました。また振り返りの記事で紹介しようかと思います。
▼AIと連携して、魔法を唱えるとその魔法に合わせて動作します。