
ROS

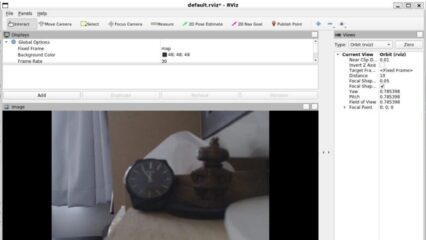
Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
はじめに 今回はUnityにROS#をインストールし、ROSでPublishされているカメラ映像をSubscribeできるようにしてみました。 ロボットの遠隔操作をするときに用いようと思っています。通信のラグなどが気 […]
Jetson Xavierを使ってみる その4(ROS、Tailscaleを利用した画像データの送受信)
はじめに 今回はROSとTailscaleを利用して、インターネットを経由した画像データの送受信を試してみました。 前回の記事ではローカルネットワークで試していました。今回は自宅と大学の間で通信を行っています。ロボッ […]
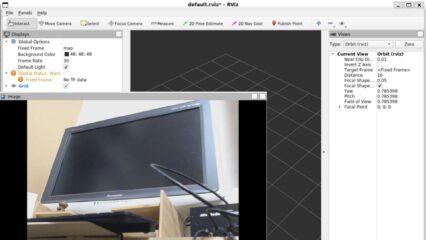
Jetson Xavierを使ってみる その3(ROSの環境構築、USBカメラ映像のPublish)
はじめに 今回はJetson XavierでROSの環境を構築して、USBカメラの映像をPublishしてみました。 ROSの通信で画像を送信して、物体検出や遠隔操作などを試したいなと思っています。 ▼以前の記事はこ […]

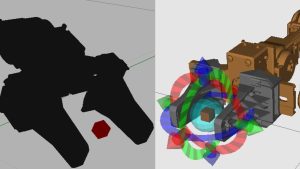
YOLOで物体検出 その3(ROSとの連携、WSL2 Ubuntu 18.04)
はじめに 今回はWSL2のUbuntu18.04でYOLOとROSを連携させてみました。 実際にYOLOで物体を検出し、その検出した位置にロボットを動かすために使われていました。リアルタイムで物体検出の処理が行われる […]

ROS1を使ってみる その5(WSL2 Ubuntu 18.04、カメラ)
はじめに 今回はWSL2のUbuntu 18.04にROSをインストールし、カメラを利用してみました。 なぜUbuntu 18.04なのかというと、ロボットの画像処理用に使われていたJetson系のコンピュータにUb […]

ROS1を使ってみる その2(PythonのコードでPublishとSubscribe)
はじめに 今回はPythonのコードでROSのPublishとSubscribeを実行してみました。 これまでOpen Manipulatorを操作するのにROSを使っていたのですが、そのためのソフトウェアは用意され […]
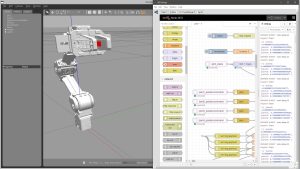
WSL2のROSとWebSocket通信(ROS Bridge、Node-RED、Gazebo)
はじめに 今回はWSL2のROS NoeticとNode-REDで、WebSocket通信を行いました。 ROSで計算した数値をNode-REDで取得したかったのですが、調べているとROS Bridgeというものを見 […]
WSL2を使ってみる その4(Ubuntu 16.04、ROS Kinetic、Open Manipulator)
はじめに これまでWSL2にUbuntu 18.04、20.04、22.04をインストールして、ROS/ROS2の環境を構築しました。今回はUbuntu 16.04です。 オンラインドキュメントや書籍の情報が多かった […]

WSL2を使ってみる その3(Ubuntu 20.04、ROS Noetic、Open Manipulator)
はじめに 今回はWSL2のUbuntu 20.04に、ROSをインストールしてみました。 前回構築したのはWSL2のUbuntu 22.04です。WSL2で複数のバージョンのUbuntu環境をインストールできたので、 […]