
5軸のロボットアームを製作する その3(キャチロボ2025、ロボコンでの動作確認)
はじめに
今回はロボコンに向けて製作していた5軸のロボットアームの、当日の動作についての紹介です。
これまでキャチロボバトルコンテストに3年間はチームで参加していましたが、今年は個人でも製作して参加していました。優勝を目指せるような機体ではないのですが、当日は安定して動作していたので良かったかなと思っています。
▼以前の記事はこちら
5軸のロボットアームを製作する その1(キャチロボ2025、部品の選定、試作品の作成)
はじめに 毎年9月頃にキャチロボバトルコンテストというお菓子を運ぶロボコンがあって、私はこれまで大学の部活動で3年間参加していました。今年は後輩のサポートをしな…

5軸のロボットアームを製作する その2(キャチロボ2025、安全措置について)
はじめに 今回は5軸のロボットアームの安全措置に関する話です。 お菓子を運ぶロボコンである、キャチロボバトルコンテストのレギュレーションに合わせています。ロボ…

ロボットアームの改良
前回の記事の時点ではクランプで机に固定していたのですが、土台部分を作成しました。2つのサーボモータで3Dプリンター製の歯車を回転させ、1つの軸を回転させました。
▼3DプリンターはPrusa MK4を使っています。
Prusa MK 4を使ってみる(3Dプリンター)
はじめに ついに念願のマイ3Dプリンターを購入しました!Prusa MK4! 知り合いの方からPrusaの話を聞いていたのですが、Maker Faire Kyoto 2023のときに実物を見るこ…

▼Prusa MK 4は在庫が無いようですが、MK4Sならあるようです。

▼強度的には問題なく使うことができていました。特に調整はしていないのですが、サーボモータの回転のタイミングも合っているようでした。
▼アーム部分を載せても回転していました。
▼すべての軸の動作を確認できました。
ちなみに、夏場の車内に荷重がかかる状態で置いておくと、3Dプリンター部品が曲がるという事件がありました。PLAのフィラメントを使っているので、温度に弱いのだと思います。
▼特に長い部品が曲がっていました。


ロボコン当日ぎりぎりまで製作していました。
▼当日の見た目はこんな感じ。配線も整理しました。
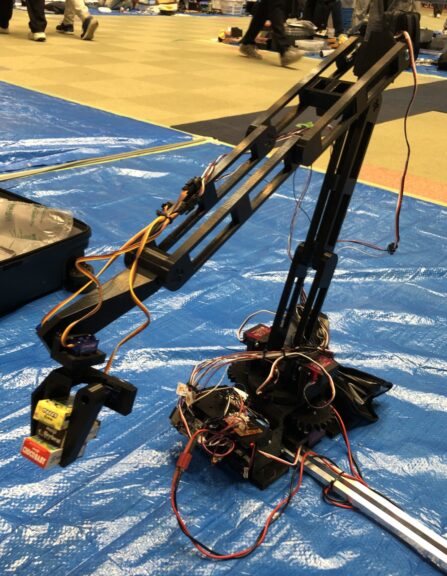
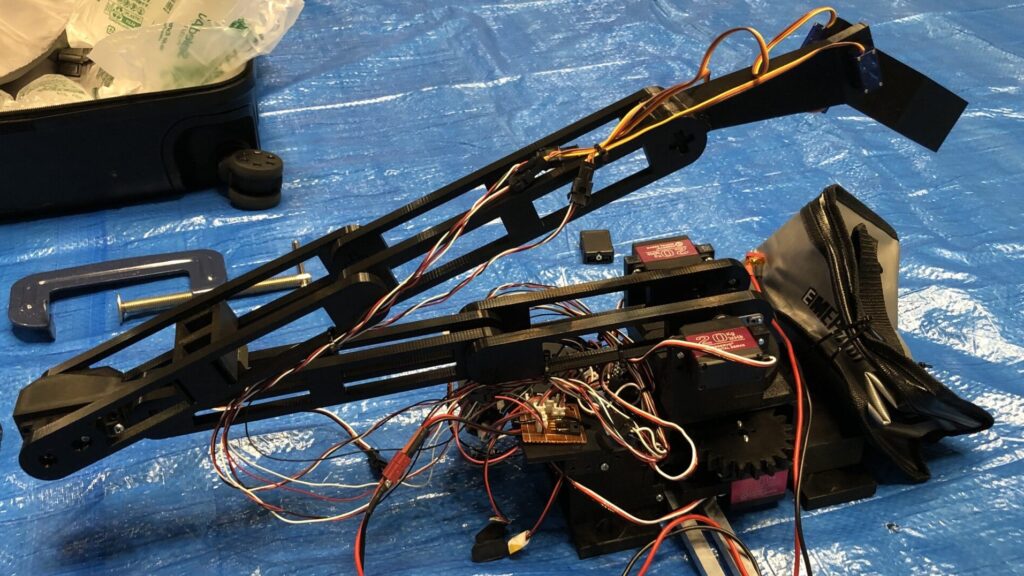
前回の記事で紹介していたセーフティバッグは、結束バンドで固定していました。
サーボモータのコネクタは、元々取り付けられているQIコネクタではテープで固定しても外れる可能性がありました。以前ハッカソンのときにツメ付きのコネクタがあることを教えてもらっていたので、今回はすべてツメ付きのコネクタに圧着し直しました。
▼こちらのコネクタを購入しました。

▼圧着工具はこちらを使っています。

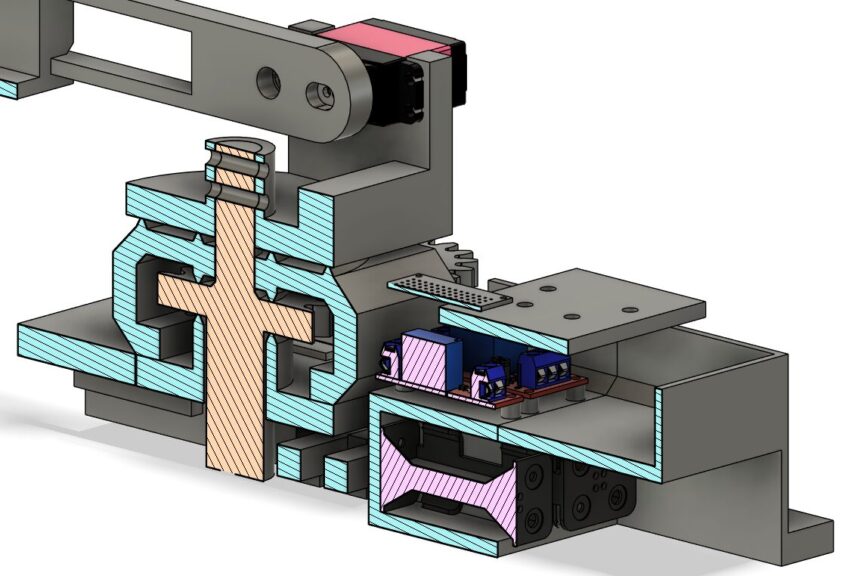
▼CAD上ではこんな感じ。
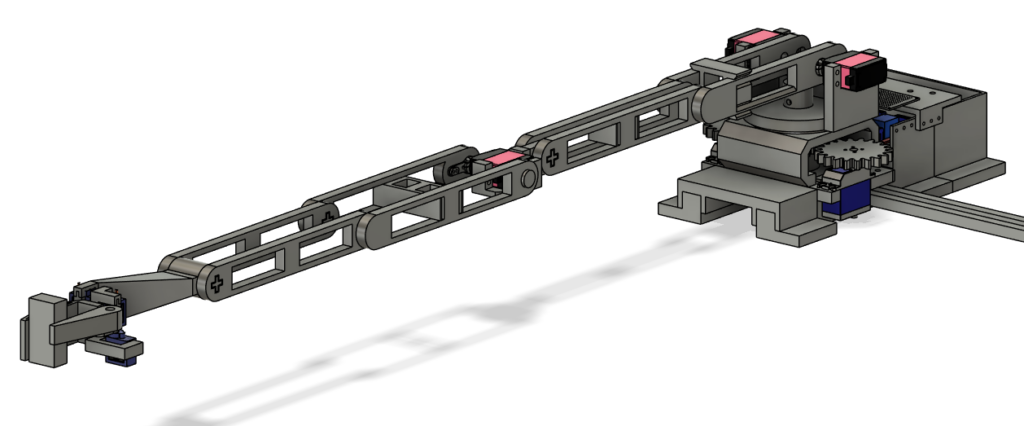
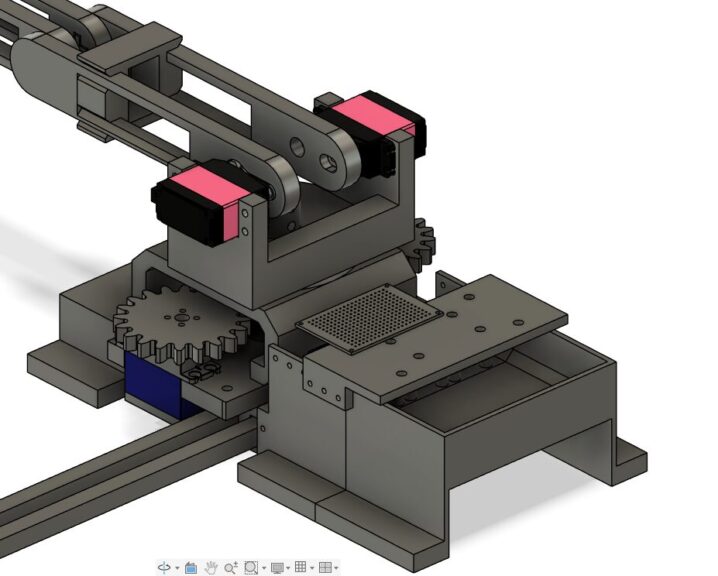
▼本来ならスラストベアリングなどを使うところだと思うのですが、今回は接触面積を減らせるような形状で支えることにしました。
最終的に、バッテリーを除いた全体の重量は2kg程度になりました。歯車も含めほとんどが3Dプリンターで製作したこともあり、軽量な機体になりました。
実際の動作
当日は基板上のボタンではなく、ESP32とPS4のコントローラによるBluetooth通信で操作していました。
▼ESP32とPS4のコントローラの接続に関しては過去にまとめています。
ESP32を使って、PS4コントローラとBluetooth接続する
はじめに 今回はESP32を使って、PS4のコントローラとのBluetooth接続をしました。ロボコンで使っているところを見たことがあります。最近はSwitchのコントローラで操作…

ESP32を使って、PS4コントローラとBluetooth接続する:ライブラリ修正編 その1
はじめに 以前の記事で、ESP32とPS4コントローラのBluetooth接続をしました。コンパイルエラーが多発して結構苦労しました。 ライブラリに問題があって、そのままだと…
予選中の動画は後輩も忙しそうだったので撮っていないのですが、練習中の動画だけ残していました。
▼こんな感じで動作していました。
最終的に3分間で12個運ぶことができ、1つ落としたので11点が得点になっていたかと思います。
5軸を順運動学でコントローラの割り当てにより制御していたので、実況でもしっかり練習していたのではないかと言われていたのですが、全くそんなことは無くて当日の合間に練習していました。意外と操縦できるものですね。
最後に
コンパクトに設計できたので、今年はキャリーバッグ1つで運搬して、本番では安定して動作させることができました。子どもたち向けのイベントに持って行くときも便利です。
今回製作した機体をもとに、対象に合わせて改造したり、ROSで制御できるようにしたりしていきたいなと思っています。
▼実際にこんな感じで子どもたちに操縦を体験してもらっていました。(サーボモータがいくつか壊れたことはさておき...)



