
5軸のロボットアームを製作する その2(キャチロボ2025、安全措置について)
はじめに
今回は5軸のロボットアームの安全措置に関する話です。
お菓子を運ぶロボコンである、キャチロボバトルコンテストのレギュレーションに合わせています。ロボコンの参加とは関係なく、ロボットを動かすうえで安全措置は重要です。暴走したときにすぐに止められるように心がけておく必要があります。
特に電気系の話で、専門ではないので不足はあるかと思いますが、できるだけ気を付けるようにしています。
▼キャチロボのページにルールブックが毎年掲載されています。安全措置に関する記述もあります。
▼以前の記事はこちら
5軸のロボットアームを製作する その1(キャチロボ2025、部品の選定、試作品の作成)
はじめに 毎年9月頃にキャチロボバトルコンテストというお菓子を運ぶロボコンがあって、私はこれまで大学の部活動で3年間参加していました。今年は後輩のサポートをしな…

リン酸鉄リチウムイオンバッテリーを使ってみる その1(LiTime 12V12Ah LiFePO4)
はじめに 今回はリン酸鉄リチウムイオンバッテリーを購入して、コネクタなどを作成して使えるようにしてみました。 ロボコンではよくリポバッテリーを使っていて、他…
バッテリー・電源について
ロボット全体のON/OFFに12V系のバッテリー、サーボモータ用に5V系の電源を用意する方針で考えました。
ロボコンのレギュレーションで、バッテリーはセーフティバッグに入れてロボットに固定することが決められています。
▼セーフティバッグは推奨されていた会社と同じものを購入して使っています。

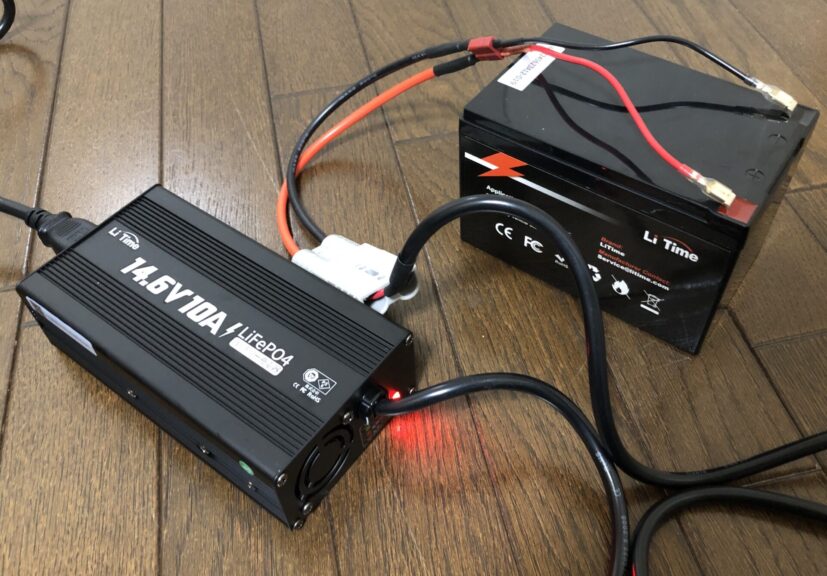
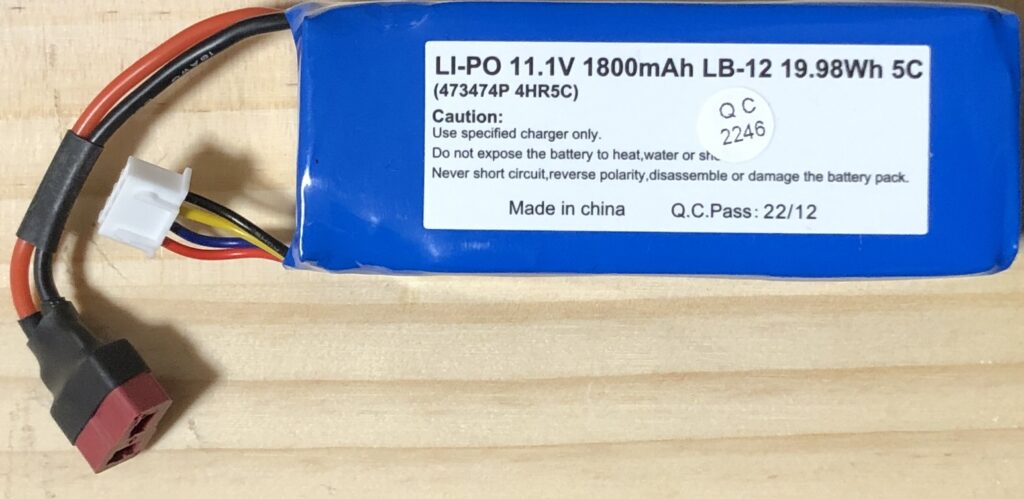
▼11.1Vのバッテリー、充電器は以下のものを利用しています。元々Dynamixelのモータを動かすために購入していました。
https://e-shop.robotis.co.jp/product.php?id=169
https://e-shop.robotis.co.jp/product.php?id=172
https://e-shop.robotis.co.jp/product.php?id=331
▼バッテリーはこんな見た目です。
サーボモータの電圧は4.8~6.8Vなどで、電池4本だとちょうどいいぐらいの電圧です。いつも使っているエネループ4本を直列にしたものを3つ使うことにしました。
▼エネループと充電器を買い足しておきました。


▼電池ボックスはロボットの底部に格納できるようにしました。


なお直列にしたものを3つ使うのは、1つだとサーボモータに必要な電流量を出力できないと思ったからです。これでも負荷が大きいところは足りない気がするので、できればもっと大きな容量のバッテリーにした方が良いような気はします。
緊急停止スイッチと電源表示灯について
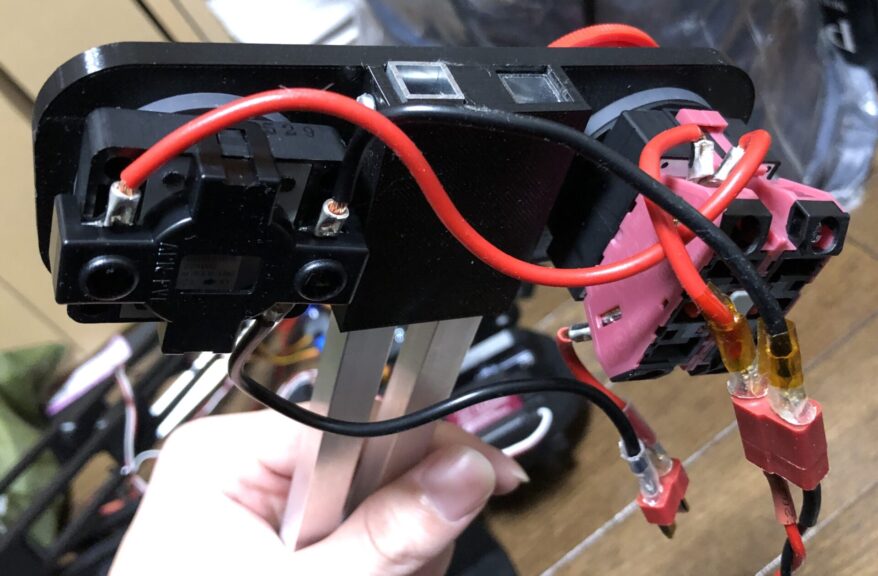
キャチロボのレギュレーションに則って、緊急停止スイッチと電源表示灯を取り付けました。
緊急停止スイッチは「赤色のプッシュロックターンリセット方式のボタンであること」、電源表示灯は「緑色に発光すること」などが指定されています。操縦者がすぐに停止でき、審判が状態を判定するためにも重要なルールだと思います。
去年も購入していたのですが、同じものをモノタロウで購入しました。
▼電源表示灯はこちら
https://www.monotaro.com/p/0693/6797
▼緊急停止スイッチはこちら
https://www.monotaro.com/p/5136/9377
▼見た目はこんな感じ。

▼回すと外せます。

3Dプリンターで出力した部品に固定しました。
▼こんな感じで固定できます。

▼3DプリンターはPrusa MK4を使っています。
Prusa MK 4を使ってみる(3Dプリンター)
はじめに ついに念願のマイ3Dプリンターを購入しました!Prusa MK4! 知り合いの方からPrusaの話を聞いていたのですが、Maker Faire Kyoto 2023のときに実物を見るこ…

▼Prusa MK 4は在庫が無いようですが、MK4Sならあるようです。

操縦席から緊急停止スイッチを押せる必要があるので、アルミ棒2本で固定しています。
▼長すぎると運搬も大変なので、のこぎりで切断し、ドリルで穴をあけて、3Dプリンター部品で固定できるようにしました。

▼アルミ棒はモノタロウで1mのものを購入しました。
https://www.monotaro.com/p/4781/2329
▼のこぎりはこちらを愛用しています。薄刃で、分厚くない材料であれば色々切れます。

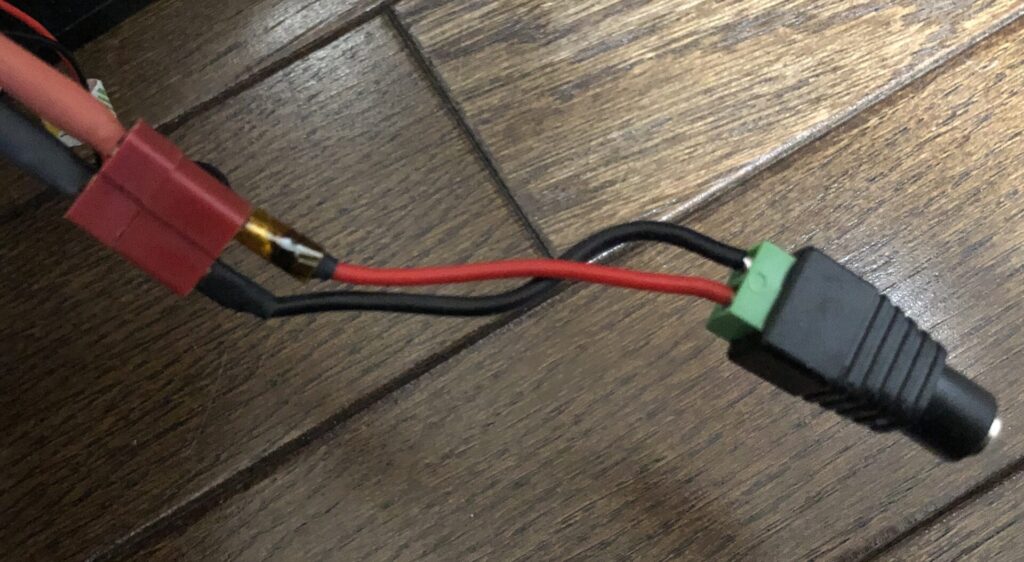
なお12V系のコネクタは、バッテリーに合わせてT型コネクタで統一しました。
▼こちらを買い足しました。

▼バッテリーではなく12V出力のアダプタでも動かすことができます。普段はこちらを使っています。
12Vリレーについて
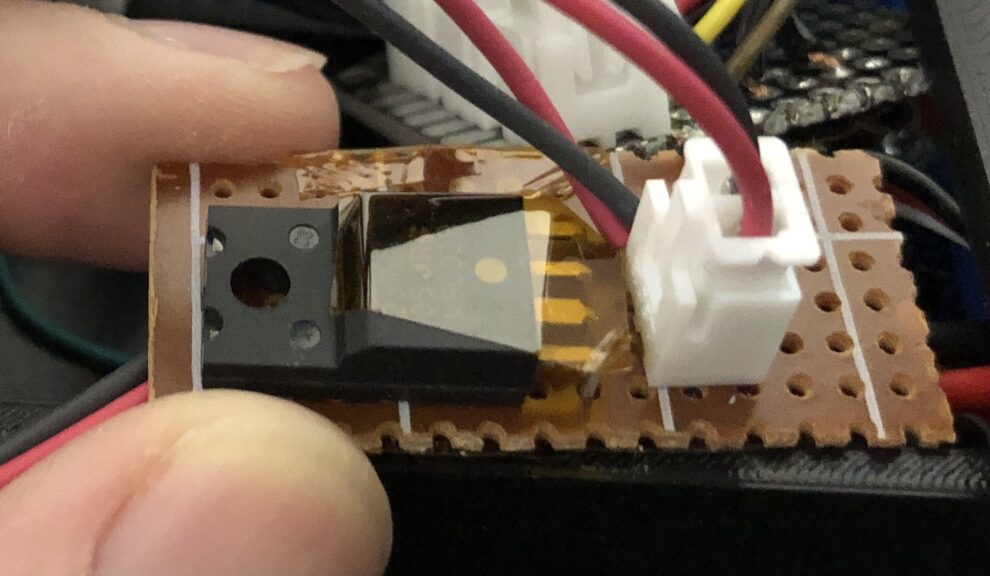
電池によるサーボモータへの電源供給で、緊急停止スイッチを経由すると経路が長くなりそうだったので、今回はリレーをはじめて使ってみることにしました。
12V系のバッテリーはマイコンへの電源供給とリレーの切り替えにしか利用しないので、電力消費は少なく、経路が長くなっても特に影響はないだろうという想定です。
▼リレーはこちらを購入しました。
▼簡単な回路で動作することを確認しました。
なお安物だからなのか、後日1つのリレーは壊れたようでした。ちゃんとした回路基板を作りたいところです。
絶縁対策について
製作期間の後半だったのですが、ヒートガンを購入したので収縮チューブをきれいに収縮させることができるようになりました。
▼ヒートガンと収縮チューブはこちらを購入しました。


仕上がりがきれいだったので、もっと早く購入しておけばよかったなと思っています。
基板底面などの絶縁は、カプトンテープを使っています。
▼幅は10mmのものを使っています。

ちゃんと固定穴を設けた基板を設計して固定することが望ましいのですが、今回はユニバーサル基板で急いで製作して、詰め込んで入れていたので、しっかり絶縁しておきました。
▼こんな感じで貼っていました。
最後に
ロボコンが終わってからも、子どもたちが集まるイベントで操縦を体験してもらっていたりするのですが、今のところ無事故で運用できています。
基板については急造したものだったので、時間があるときにちゃんと設計して発注したいなと思っています。
次回の記事では実際にロボコン当日などでの動作について紹介しようと思っています。

