Jetson Xavierを使ってみる その5(NoMachine、リモートデスクトップ接続)
はじめに
今回はNoMachineを利用して、PCからJetson Xavierへのリモートデスクトップ接続を試してみました。
これまでもリモートデスクトップ接続は色々試していたのですが、今回はヘッドレス運用しているJetson Xavierへの接続です。そもそもデスクトップ画面が出力されていない状態なのですが、それでも仮想ディスプレイを出力してくれるNoMachineがあるということで使ってみました。
▼以前の記事はこちら
Google Chromeのリモートデスクトップを試してみる
はじめに 今回はGoogle Chromeのリモートデスクトップを試してみました。 普段はノートPCを持ち運んで使っているのですが、よりGPUの処理性能が高いデスクトップPCに…

Jetson Nanoを使ってみる(周辺機器、リモートデスクトップ接続)
はじめに 以前Jetson Nanoを手に入れたので、今回はこれからロボットの開発をするための準備です。追加で購入しないといけないものが色々とありました。 CLI(コマン…
NoMachineをインストールする
Windows側へのインストール
まずWindows側のPCにNoMachineをインストールします。
▼PCは10万円ぐらいで購入したゲーミングノートPCを利用しています。Windows 11の環境です。
ちょっと買い物:新しいノートPCとSSDの増設(ASUS TUF Gaming A15)
はじめに 今回はこれまで使っていたPCが壊れたので買い替えましたという話です。 以前はよく分からないGPUが載っていたノートPCを使っていたのですが、最近はUnreal E…


▼こちらのページからNoMachineのインストーラをダウンロードしました。
インストーラを実行後、再起動する必要がありました。
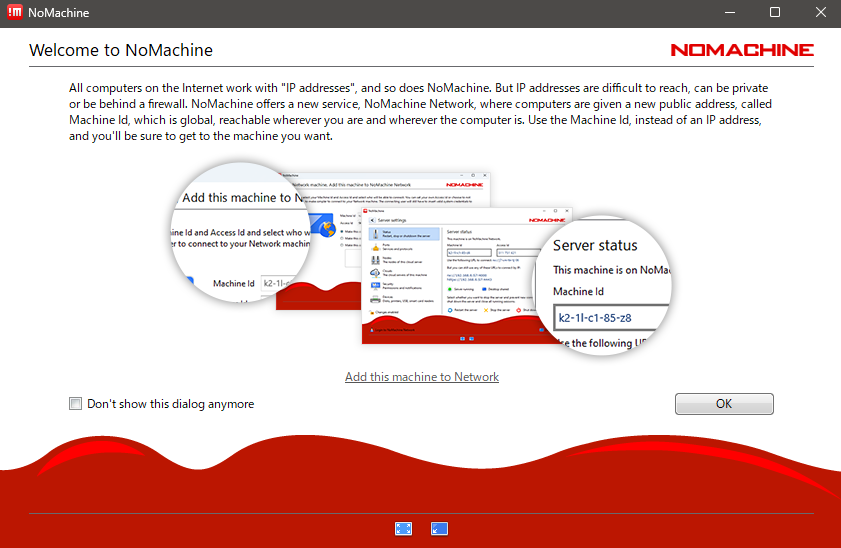
▼以下のような画面が最初に表示されました。
Jetson Xavierへのインストール
次にJetson Xavier側にNoMachineをインストールします。
▼ARM用のNoMachineは以下のページに一覧があります。
https://download.nomachine.com/download/?id=30&platform=linux&distro=arm
今回はブラウザを使わずにターミナルのみでインストールしたかったのですが、そのためのコマンドがありました。
▼こちらのフォーラムに書かれていました。
以下のコマンドを実行し、NoMachineをインストールしました。
curl -fSL "https://www.nomachine.com/free/arm/64/deb" -o nomachine_arm64.deb
sudo dpkg -i nomachine_arm64.deb▼現時点で最新の、9.3.7-1がインストールされました。
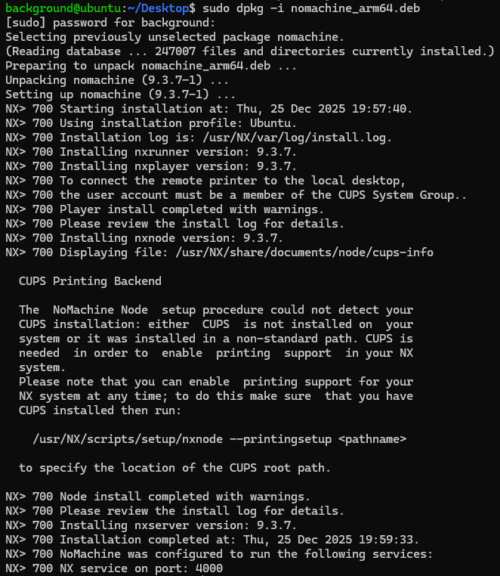
最後の出力を見ると、4000ポートで起動していることが分かります。
リモートデスクトップ接続を試してみる
Windows側のPCでNoMachineを起動し、接続を行います。
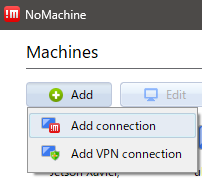
▼AddからAdd connectionで接続先を追加します。
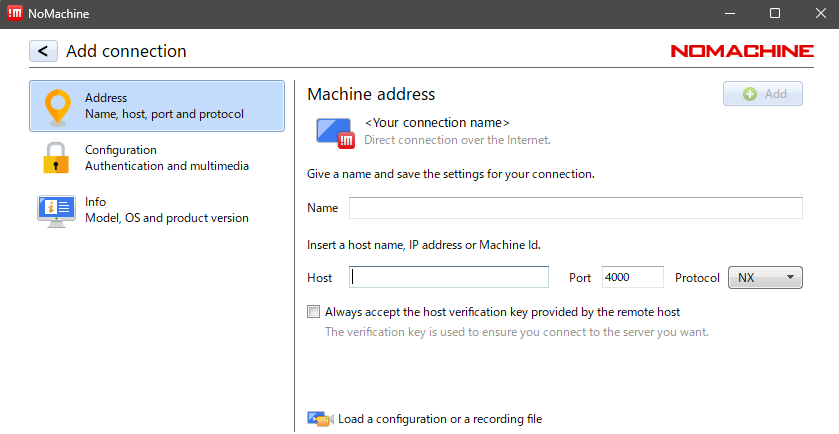
▼HostにIPアドレスを入力します。Portは先程のターミナル出力にもあったように、4000ポートになっています。
▼接続先が追加されました。
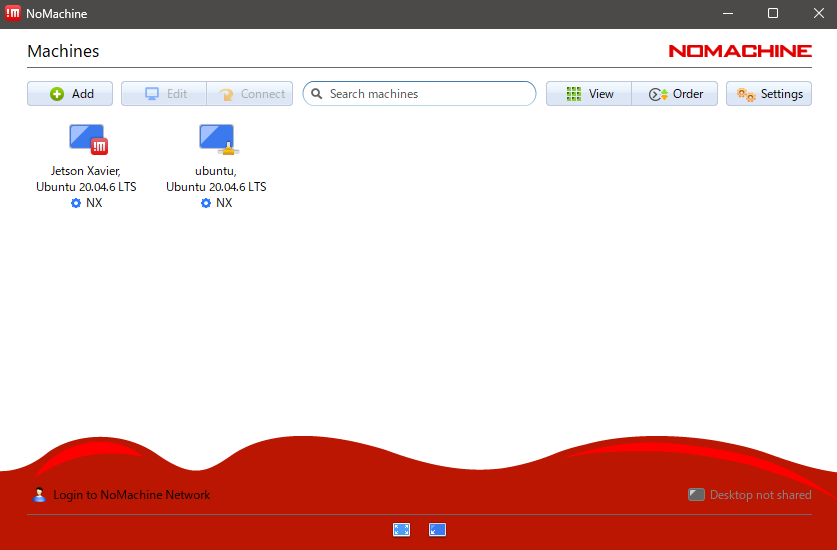
ダブルクリックして接続しました。
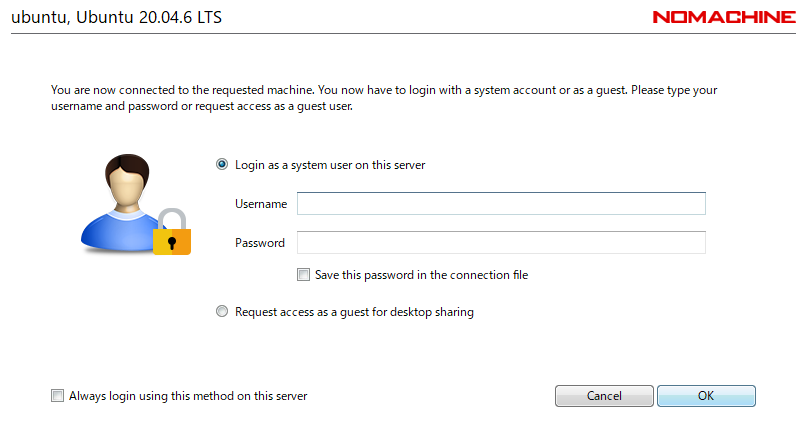
▼ユーザー名とパスワードを入力するようになっています。
▼画面が出てきたのですが、黒いままデスクトップ画面が表示されませんでした。
Jetson Xavierを再起動してから試すと、問題なく表示されました。そもそもディスプレイが検出されていないと表示されたのですが、実際Jetson Xavierをヘッドレス運用していたので、ディスプレイには繋いでいない状態でした。
▼NoMachineがディスプレイを作成して接続するかどうかが聞かれました。
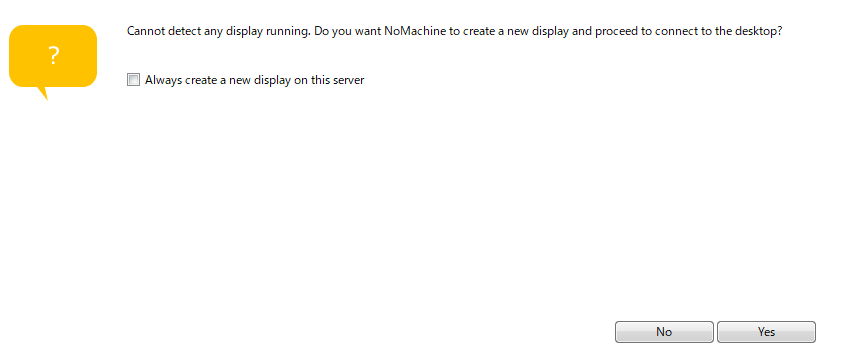
Yesを選択すると、デスクトップ画面が表示されました。
▼少し間を置いてデスクトップ画面が表示されました!
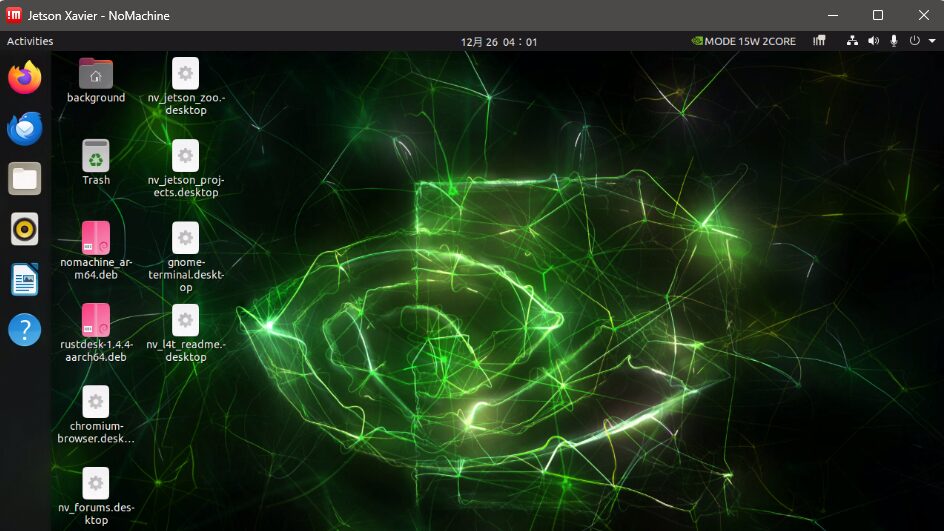
▼右上にマウスを持って行くと、NoMachineの設定画面に移動できるようです。

▼以下のような設定画面が表示されました。
動作はGoogle Chromeのリモートデスクトップ接続を使っていた時よりも遅かったのですが、Jetson Xavierのスペック的に制約があるのかと思います。元々右上に15W 2COREと書かれていたのですが、これはJetson Xavierの最大出力ではないです。
▼20W 6COREにしたところ、多少は早くなったような気がしました。
追記:ダミープラグを使ってみる
Jetson Xavierを再起動してから再接続しようとすると、また真っ暗な画面だけ表示されることがありました。
▼仮想ディスプレイを有効化するかどうかも聞かれませんでした。
ダミープラグを購入したので、使ってみました。
▼こちらを購入しました。

ダミープラグを接続してすぐに、デスクトップ画面が表示されました。
▼解像度が高いので文字が小さくなっています。
▼ログイン後、画面が表示されました。

文字が小さすぎて見づらかったので、Settingsで解像度を変更しておきました。
▼DisplaysのResolutionが、最初は3840×2160になっていました。
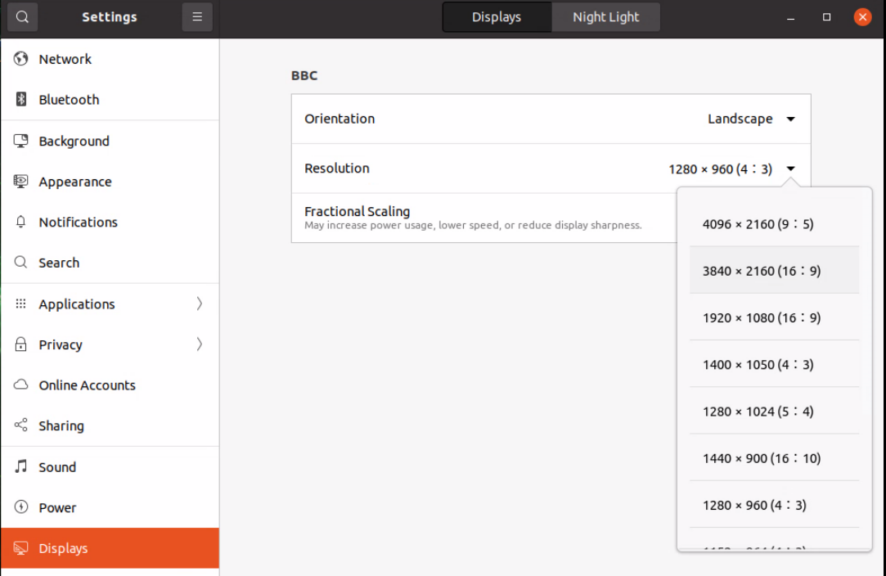
▼1280×960に変更しました。
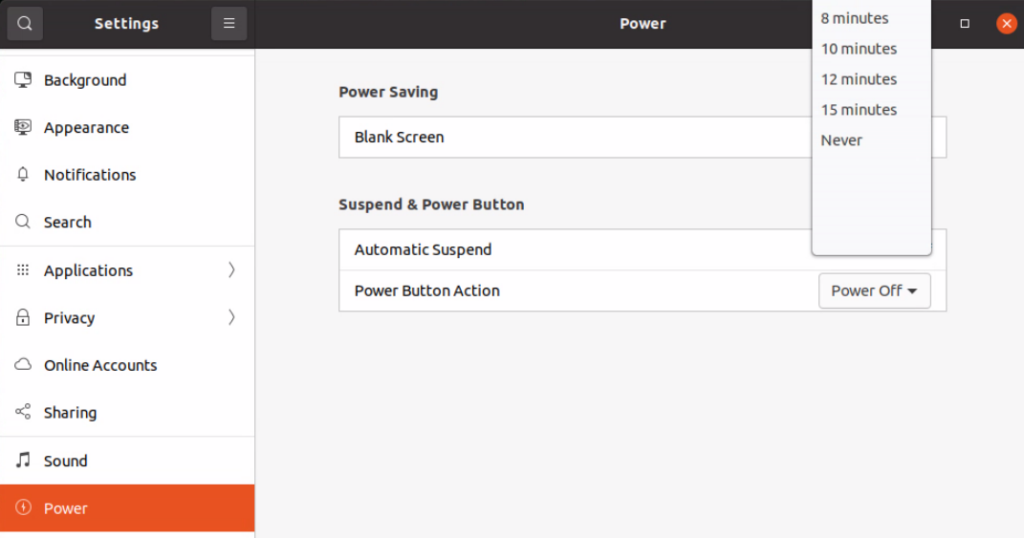
ついでに、デスクトップ画面が自動でロック画面にならないように変更しました。
▼PowerのBlank ScreenでNeverに変更しました。
仮想ディスプレイをソフトウェアで用意する方法もあるらしいのですが、ダミープラグなら安価で差すだけなので、楽にリモートデスクトップ接続をすることができそうです。
最後に
この後ROSを利用してUSBカメラの映像をデスクトップ画面で確認することもできました。問題なく利用できそうです。
ブラウザにアクセスしたり、GUIで設定を行いたい場面が何かとあるので、これでさらに便利に使えそうです。
▼ちなみに、VPNとして利用しているTailscaleのIPアドレスでも接続できました。
Jetson Xavierを使ってみる その2(通信周りの設定、Node-RED、TailScale)
はじめに 今回は以前OSのセットアップを行ったJetson Xavierの通信周りの設定を行いました。 自宅サーバーとして使いたかったので、外部のネットワークからでもアクセ…