NVIDIA Isaac Labを試してみる その1(環境構築、Windows 11)
はじめに
今回はNVIDIAのIsaac Labの環境構築と起動について試してみました。
Isaac Labはデジタルツインの研究や企業の展示で見聞きしていたのですが、特にGPUの要求スペックが高いので触れてはいませんでした。私のリソースでは大規模なことはできませんが、可能な範囲で触れておきたいなと思っています。
▼NVIDIA Isaac Labのページはこちら
https://developer.nvidia.com/isaac/lab
▼以前の記事はこちら
Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
はじめに 今回はUnityにROS#をインストールし、ROSでPublishされているカメラ映像をSubscribeできるようにしてみました。 ロボットの遠隔操作をするときに用いようと…
ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
はじめに 最近WSL2でUbuntu環境を複数インストールできるようになったので、ROS2の環境を改めて構築してみました。 大学の研究でロボットの遠隔操作にも取り組み始め…
環境を構築する
▼システム要件などについては以下のページに書かれています。
https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/index.html#local-installation
VRAM 16GB以上、RAM 32GB以上とのことですが、私のノートPCはVRAM 4GB、RAM64GBなのでVRAMは足りていない環境になります。
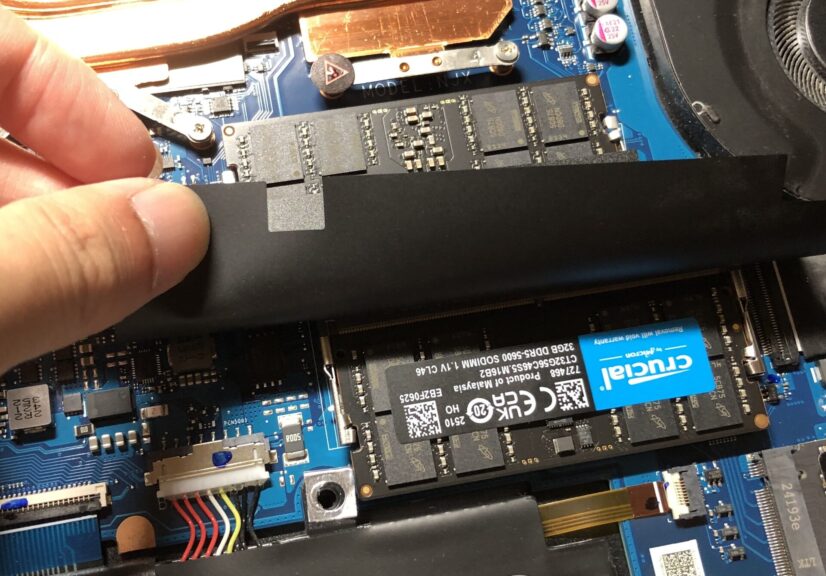
▼PCは10万円ぐらいで購入したゲーミングノートPCを利用しています。Windows 11の環境です。
ちょっと買い物:新しいノートPCとSSDの増設(ASUS TUF Gaming A15)
はじめに 今回はこれまで使っていたPCが壊れたので買い替えましたという話です。 以前はよく分からないGPUが載っていたノートPCを使っていたのですが、最近はUnreal E…


▼メモリはローカルLLMを実行するために、64GBに交換しています。
ちょっと買い物:ノートPCのメモリ交換(ASUS TUF Gaming A15、gpt-oss-20b)
はじめに 今回はいつも使っているノートPCのメモリを交換して、16GBから64GBに増やしてみました。 リリースされたばかりのgpt-oss-20bをローカルで実行したときにメモ…

まずはIsaac Simをインストールします。インストール方法は色々あるようですが、今回はPipを利用してインストールを行います。
▼以下のページを参考にインストールを行います。
https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/pip_installation.html
Pythonの仮想環境はvenvを利用します。
▼普段からvenvを使っています。
Pythonの仮想環境を作成する(venv、Windows)
はじめに 今回はPythonの仮想環境の作成についてまとめてみました。 Pythonを利用したNode-REDのノードを開発するときに仮想環境を詳しく調べていました。作成した仮…

以下のコマンドで仮想環境を作成し、有効化しました。
py -3.11 -m venv env_isaaclab
env_isaaclab\Scripts\activate
pipのアップグレードも実行しておきました。
python -m pip install --upgrade pipPyTorch関連のパッケージをインストールするのですが、ドキュメントのものはCUDA 12.8用でした。システムのCUDAのバージョンを確認しておきました。
▼nvidia-smiを実行したところ、CUDA 12.8になっていました。
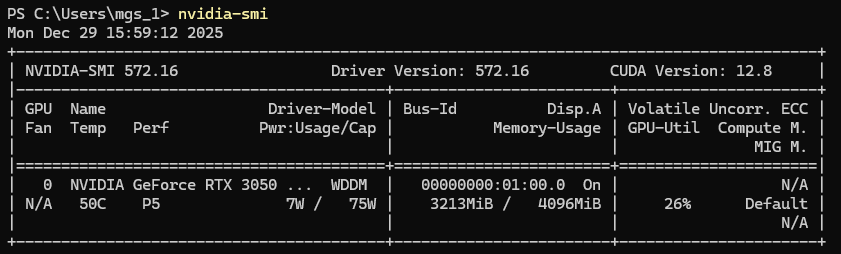
バージョンは揃っていたので、以下のコマンドでパッケージをインストールしました。
pip install "isaacsim[all,extscache]==5.1.0" --extra-index-url https://pypi.nvidia.com
pip install -U torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128以下のコマンドでIsaac Simを起動しました。
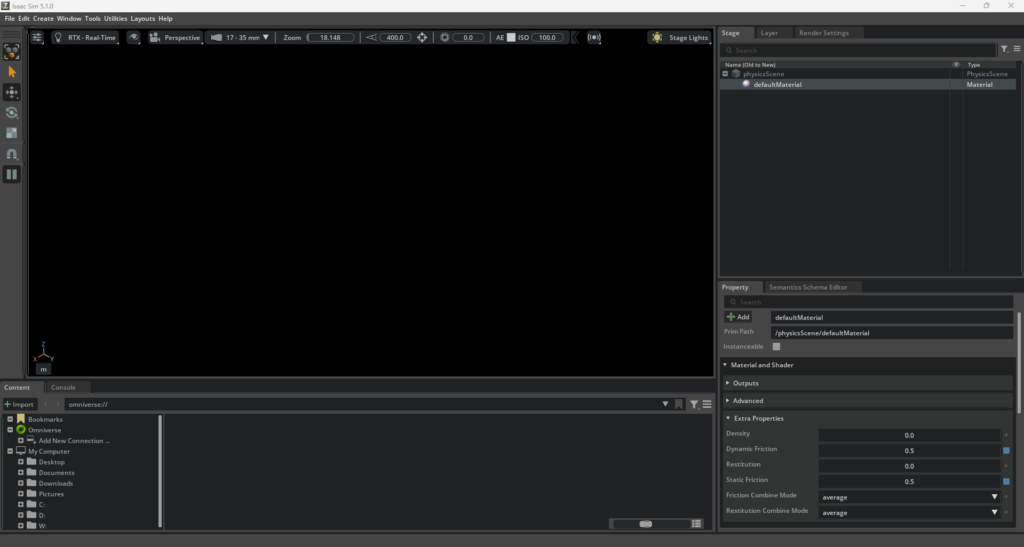
isaacsim▼問題なく起動しました。
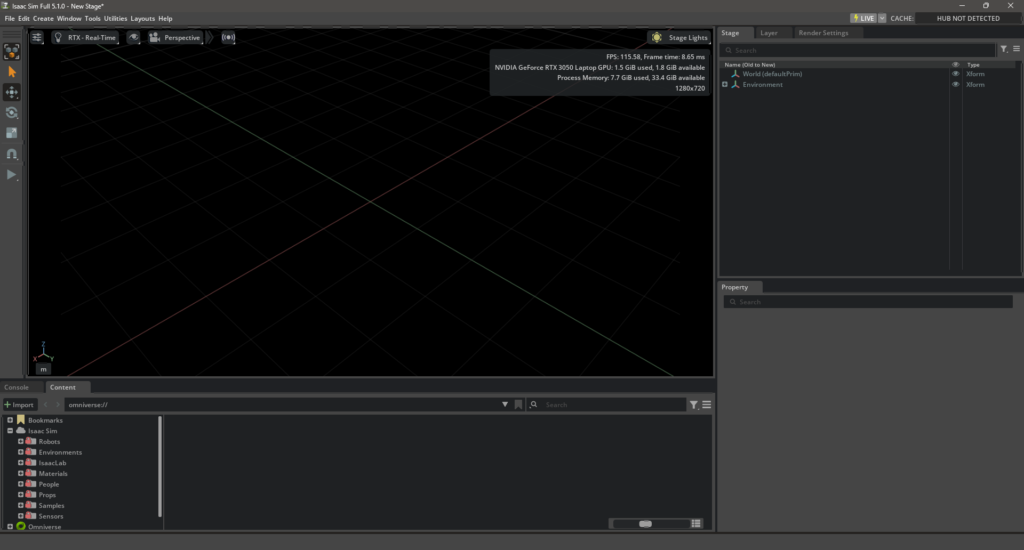
▼GPUやメモリの消費量が表示されていました。

下の欄にロボットのモデルが用意されていました。
▼ロボット関連で有名な企業の名前が並んでいます。日本の企業もあります。
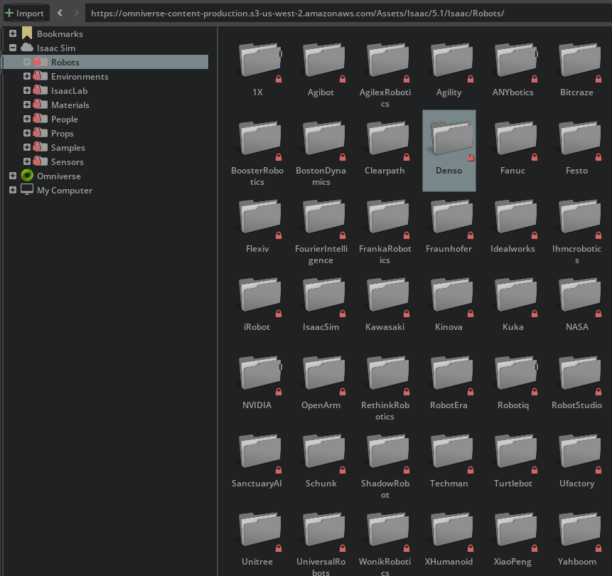
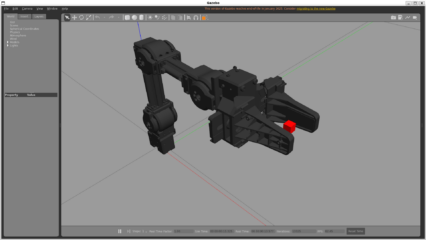
モデルをStage上に配置することができました。
▼こちらはDENSOのCobotta Pro 1300です。

研究で触ったことがあるロボットアームなのですが、グリッパは標準装備では無かったと思います。モデルには含まれていますね。
Isaac Labのインストールも行います。GitHubのリポジトリをダウンロードします。
git clone https://github.com/isaac-sim/IsaacLab
cd IsaacLab
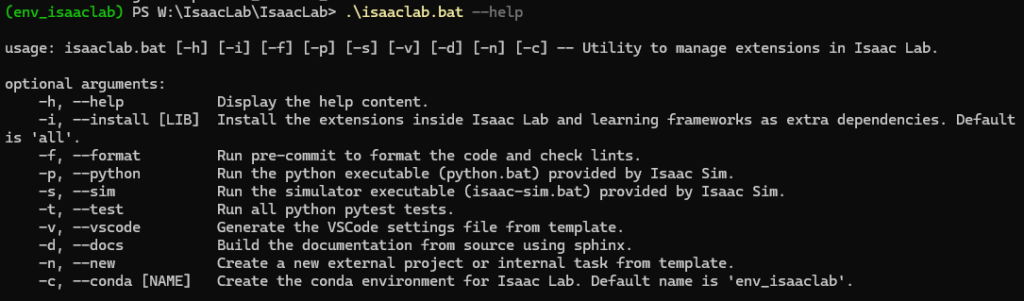
.\isaaclab.bat --help▼ヘルプが問題なく表示されました。
batファイルでインストールし、起動してみます。
.\isaaclab.bat --install
python scripts\tutorials\00_sim\create_empty.py▼問題なく起動しました。
サンプルを実行する
以下のコマンドで、強化学習のサンプルを実行しました。
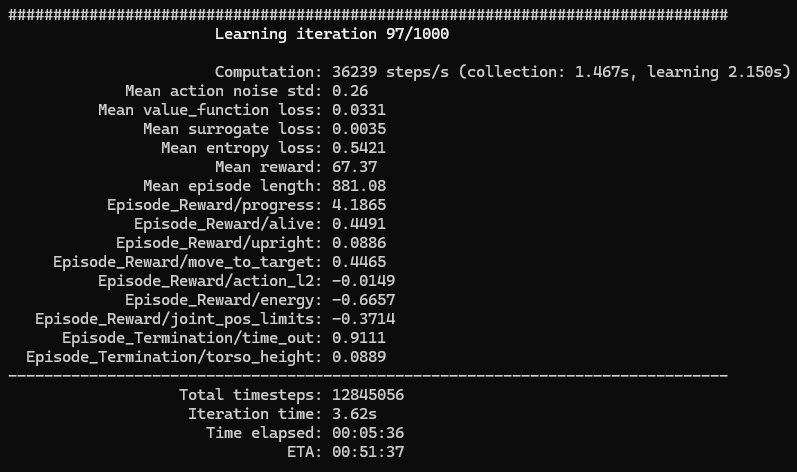
.\isaaclab.bat -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0 --headless▼学習が進んでいきました。
▼時間はかかりましたが、最後まで進みました。
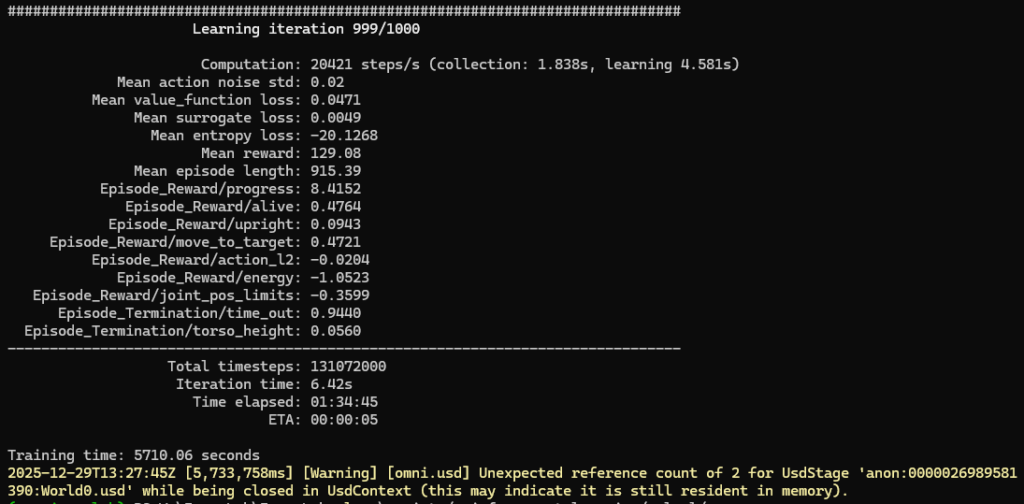
3D Gaussian Splattingを実行していたときはメモリが足りないと強制終了することがあったのですが、これは実行できたみたいです。
先程はheadlessオプションがついていたのでターミナルへの出力のみでしたが、オプションを省くとGUIも起動しました。
.\isaaclab.bat -p scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0▼以下のように、モデルが大量に並んでいました。

▼実際の動きはこんな感じ
私のPCでは処理が重くて動きも遅かったのですが、起動できることは確認できました。
最後に
動作するようにはなったのですが、やはりPCのスペック不足を感じます。Unreal Engineで開発するときもすべてのパフォーマンスに関するパラメータは一番低い状態なのですが、Isaac Labでもレンダリングのパフォーマンスを下げることができるのか気になっています。
ひとまず起動はするので、色々試していこうと思っています。