リン酸鉄リチウムイオンバッテリーを使ってみる その1(LiTime 12V12Ah LiFePO4)
はじめに
今回はリン酸鉄リチウムイオンバッテリーを購入して、コネクタなどを作成して使えるようにしてみました。
ロボコンではよくリポバッテリーを使っていて、他の方が使っている話もよく聞くのですが、バッテリーが膨らんだとか、接続を間違えて被膜が溶けたなどの怖い話を聞いていました。もっと安全なバッテリーを探していたときに鉛蓄電池とリン酸鉄リチウムイオンバッテリーが候補に挙がりました。
▼リン酸鉄リチウムイオンバッテリーは初めて知ったので、調べていました。
リン酸鉄リチウムイオンバッテリーは鉛蓄電池よりも小型で、リポバッテリーよりもエネルギー密度は低いものの安全に使えそうという印象でした。新しく設計中のロボットに搭載してみようと思っています。
▼以前の記事はこちら
モータードライバーを使ってモーターを制御する その2(DRV8835)
はじめに 今回はモータードライバーのDRV8835を使ってみました。普段からよく使っているTB6612FNGとは制御方法が異なります。基板の大きさがこちらのほうが小さいですね…
ちょっと買い物:ミニPC、PiSugar 3
はじめに 少し前の話ですが、Amazonプライムデーで安くなっていたミニPCと、PiSugar 3を購入してみました。 ミニPCにUbuntu 18をインストールして、ROSの環境を構築し…

バッテリーと周辺機器の購入
▼今回購入したバッテリーはこちら

ロボットに搭載する予定だったので、LiTimeで販売されている12Vのリン酸鉄リチウムイオンバッテリーの中でも小型のものを選びました。
なぜLiTimeのバッテリーを購入したのかというと、自社でバッテリーの回収を行っているようだったからです。リポバッテリーの処分に毎回困っていたので、今回は処分についても調べてから選んでいます。
▼こちらのページにも書かれています。
https://jp.litime.com/pages/pages-recycling
充電器もLiTimeのものを購入したのですが、もっと大きな容量のものも充電できるようにコネクタが大型のものになっていました。
▼こちらの充電器を購入してみました。

▼12V用の充電器については、以下のページに詳しく書かれています。
https://jp.litime.com/blogs/news/procedure-for-using-a-lifepo4-charger
電圧についても書かれているのですが、100%の状態では13.33V、13Vで25%程のようです。
なお充電するときに推奨されている電流値よりも大きいので、バッテリーの寿命はゆっくり充電するよりも短くなるかもしれません。これよりも電流値が小さい充電器は他社から販売されていたのですが、充電中に熱を持つとか、音が大きいと書かれていました。音については、今回購入したもので実際に充電したときも、3Dプリンターのファンよりうるさいという感じでした。
充電器のコネクタが大きくてこのままでは充電できないので、充電用の端子を作成するための部品を購入しました。
▼こちらの平型端子をバッテリーに接続できました。

今後接続しやすいように、リポバッテリーでも使っていたT型コネクタで配線することにしました。
▼定格電流は40Aと書かれています。
https://akizukidenshi.com/catalog/g/g113420
https://akizukidenshi.com/catalog/g/g113434

とにかく安全に使いたいので、ロボットに搭載するときはヒューズも入れる予定です。40Aも流れる前に切れると思います。
コネクタの作成
購入した平型端子を圧着したかったのですが、普段使っていた工具は小さい端子用のものだったので、対応していませんでした。
▼XH、PH、QIコネクタなどを使うことが多くて、小さい端子用のもので事足りていました。

今回は線径が太かったので、急遽コーナンに買いに行きました。
▼こちらを購入しました。

圧着工具はいくつか種類があったのですが、ワイヤストリッパーもFujiyaのものを普段から使っていたので、同社のものを購入しました。
▼これもコーナンで買ったと思います。

いつも収縮チューブをちゃんと収縮させていなかったので、ヒートガンも購入しました。
▼小型でいい感じです。


ちゃんと収縮させていなかったものを収縮させてみました。
▼しっかり収縮して、きれいに仕上がりました。


▼ケーブルは16AWGの耐熱ビニル絶縁電線を購入しました。


▼実際に作成したケーブルはこちら。平型端子は全然抜けないぐらいに差さっています。

充電してみる
最初電圧をテスターで測ったときは13.16Vだったので、だいたい50%ぐらいは充電されているようでした。作成したコネクタと充電器で充電してみます。
▼テスターはこちらを使っています。薄型で持ち運びにも便利です。

作成したコネクタで接続してみました。
▼リレーみたいな音がして、充電中になりました。
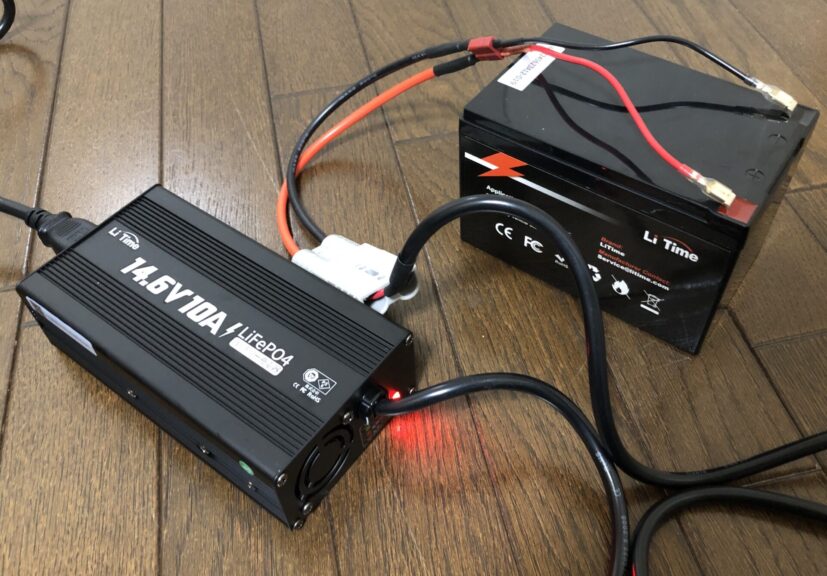
▼しばらくして、満充電の状態になりました。

この時点で13.7Vになっていました。翌日にバッテリーの電圧を確認すると13.36V、モーターを動かしてからは13.24Vという感じでした。
▼充電直後の電圧が高くて、その後降下するのは自然なことのようです。
https://www.dalybms.com/news/why-does-voltage-drop-occur-after-full-charge
最後に
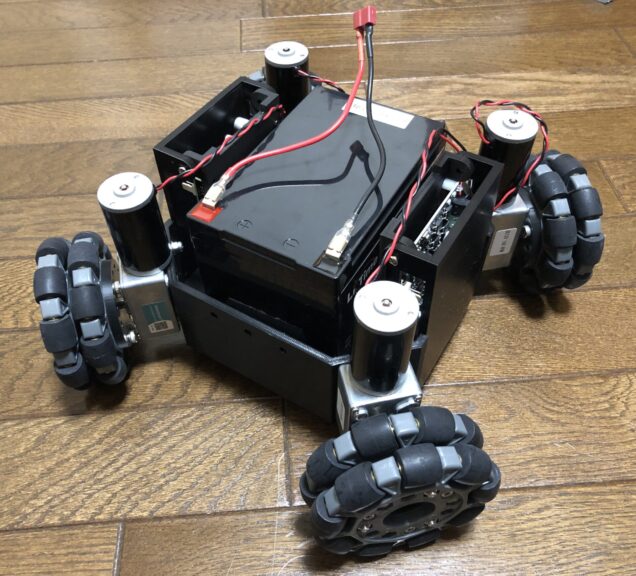
今回のバッテリーを開発中の移動ロボットに搭載できることは確認したので、実際に走行できるか試そうと思っています。モーターのトルクが足りているのかを心配しているところです。
▼こんな感じで収まっています。一応機体の衝撃を吸収するためにゴムを挟んでいます。