
Tailscale
Jetson Xavierを使ってみる その4(ROS、Tailscaleを利用した画像データの送受信)
2025年11月11日
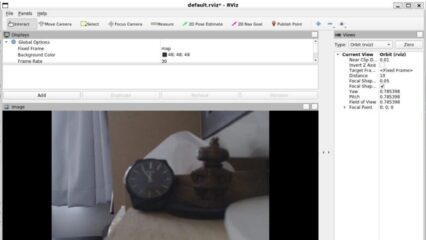
はじめに 今回はROSとTailscaleを利用して、インターネットを経由した画像データの送受信を試してみました。 前回の記事ではローカルネットワークで試していました。今回は自宅と大学の間で通信を行っています。ロボッ […]

Jetson Xavierを使ってみる その2(通信周りの設定、Node-RED、TailScale)
2025年9月4日
はじめに 今回は以前OSのセットアップを行ったJetson Xavierの通信周りの設定を行いました。 自宅サーバーとして使いたかったので、外部のネットワークからでもアクセスできるようにしています。今回利用したTai […]