
Jetson Xavier
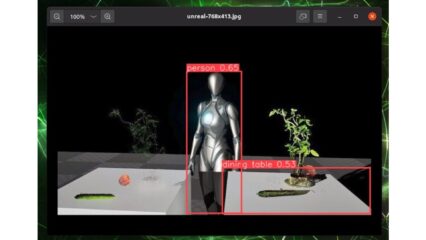
Jetson Xavierを使ってみる その6(YOLO、CUDAのバージョン切り替え、GPUでの処理)
はじめに 今回はJetson XavierでYOLOを用いた物体検出を試してみました。 Jetson XavierはGPUの性能が高いので、GPUを利用して実行できるように環境を構築しました。OSが古かったり、アーキ […]

Jetson Xavierを使ってみる その5(NoMachine、リモートデスクトップ接続)
はじめに 今回はNoMachineを利用して、PCからJetson Xavierへのリモートデスクトップ接続を試してみました。 これまでもリモートデスクトップ接続は色々試していたのですが、今回はヘッドレス運用している […]

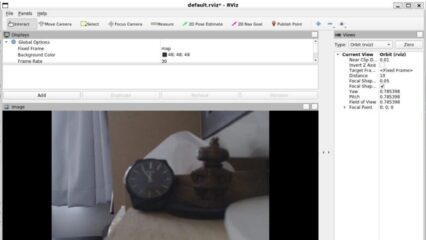
Unityを使ってみる その2(ROS#、カメラ映像のSubscribe)
はじめに 今回はUnityにROS#をインストールし、ROSでPublishされているカメラ映像をSubscribeできるようにしてみました。 ロボットの遠隔操作をするときに用いようと思っています。通信のラグなどが気 […]
Jetson Xavierを使ってみる その4(ROS、Tailscaleを利用した画像データの送受信)
はじめに 今回はROSとTailscaleを利用して、インターネットを経由した画像データの送受信を試してみました。 前回の記事ではローカルネットワークで試していました。今回は自宅と大学の間で通信を行っています。ロボッ […]
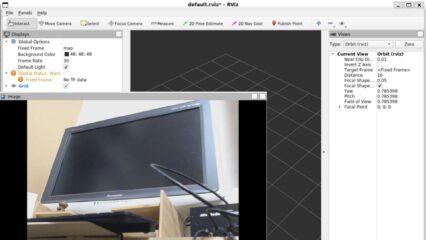
Jetson Xavierを使ってみる その3(ROSの環境構築、USBカメラ映像のPublish)
はじめに 今回はJetson XavierでROSの環境を構築して、USBカメラの映像をPublishしてみました。 ROSの通信で画像を送信して、物体検出や遠隔操作などを試したいなと思っています。 ▼以前の記事はこ […]

Jetson Xavierを使ってみる その2(通信周りの設定、Node-RED、TailScale)
はじめに 今回は以前OSのセットアップを行ったJetson Xavierの通信周りの設定を行いました。 自宅サーバーとして使いたかったので、外部のネットワークからでもアクセスできるようにしています。今回利用したTai […]

Jetson Xavierを使ってみる その1(JetPack 5.1.5のセットアップ)
はじめに 最近TechSeeker Hackathon 2025というハッカソンに参加しているのですが、参加者特典でJetson Xavierを1万円で購入できました。今回はそのセットアップをしてみたという話です。 […]