
ROS
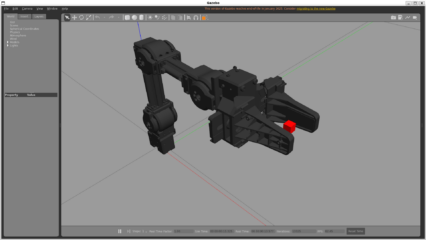
ROS2を使ってみる その4(OpenManipulatorのシミュレーション、WSL2 Ubuntu 22.04)
はじめに 今回はROS2でOpenManipulatorのシミュレーションを実行してみました。 WSL2で新しくROS2の環境を構築しましたが、具体的なロボットのシミュレーションは行っていなかったので、改めて動作確認 […]

ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
はじめに 最近WSL2でUbuntu環境を複数インストールできるようになったので、ROS2の環境を改めて構築してみました。 大学の研究でロボットの遠隔操作にも取り組み始めているのですが、通信周りを改善させるにはROS […]
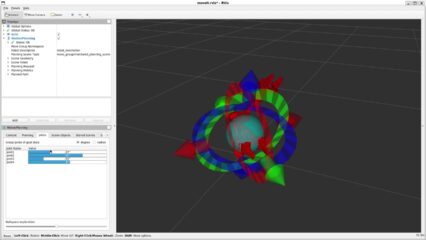
ROS1を使ってみる その6(MoveItのパッケージ作成、Open Manipulator)
はじめに 今回はOpen Manipulatorを練習の題材として、MoveItのパッケージを作成してみました。 ジョイントやリンクの親子関係などを記述したURDFファイルについては以前作成したので、MoveItで運 […]

ROS1を使ってみる その5(WSL2 Ubuntu 18.04、カメラ)
はじめに 今回はWSL2のUbuntu 18.04にROSをインストールし、カメラを利用してみました。 なぜUbuntu 18.04なのかというと、ロボットの画像処理用に使われていたJetson系のコンピュータにUb […]
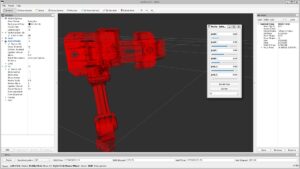
ROS1を使ってみる その4(URDFファイルの作成、Open Manipulator)
はじめに 今回はOpen ManipulatorのURDFファイルを作成してみました。 これまではROSですでに用意されていたOpen Manipulatorのモデルを利用していましたが、URDFファイルを作成できる […]
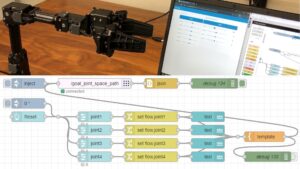
ROS1を使ってみる その3(Open Manipulatorの操作、Node-RED)
はじめに 今回はOpen ManipulatorのROS Serviceでの制御を確認し、Node-REDのノードでも操作してみました。 ROS Serviceを扱うのははじめてです。データ形式がややこしくてまだ完全 […]

ROS1を使ってみる その2(PythonのコードでPublishとSubscribe)
はじめに 今回はPythonのコードでROSのPublishとSubscribeを実行してみました。 これまでOpen Manipulatorを操作するのにROSを使っていたのですが、そのためのソフトウェアは用意され […]
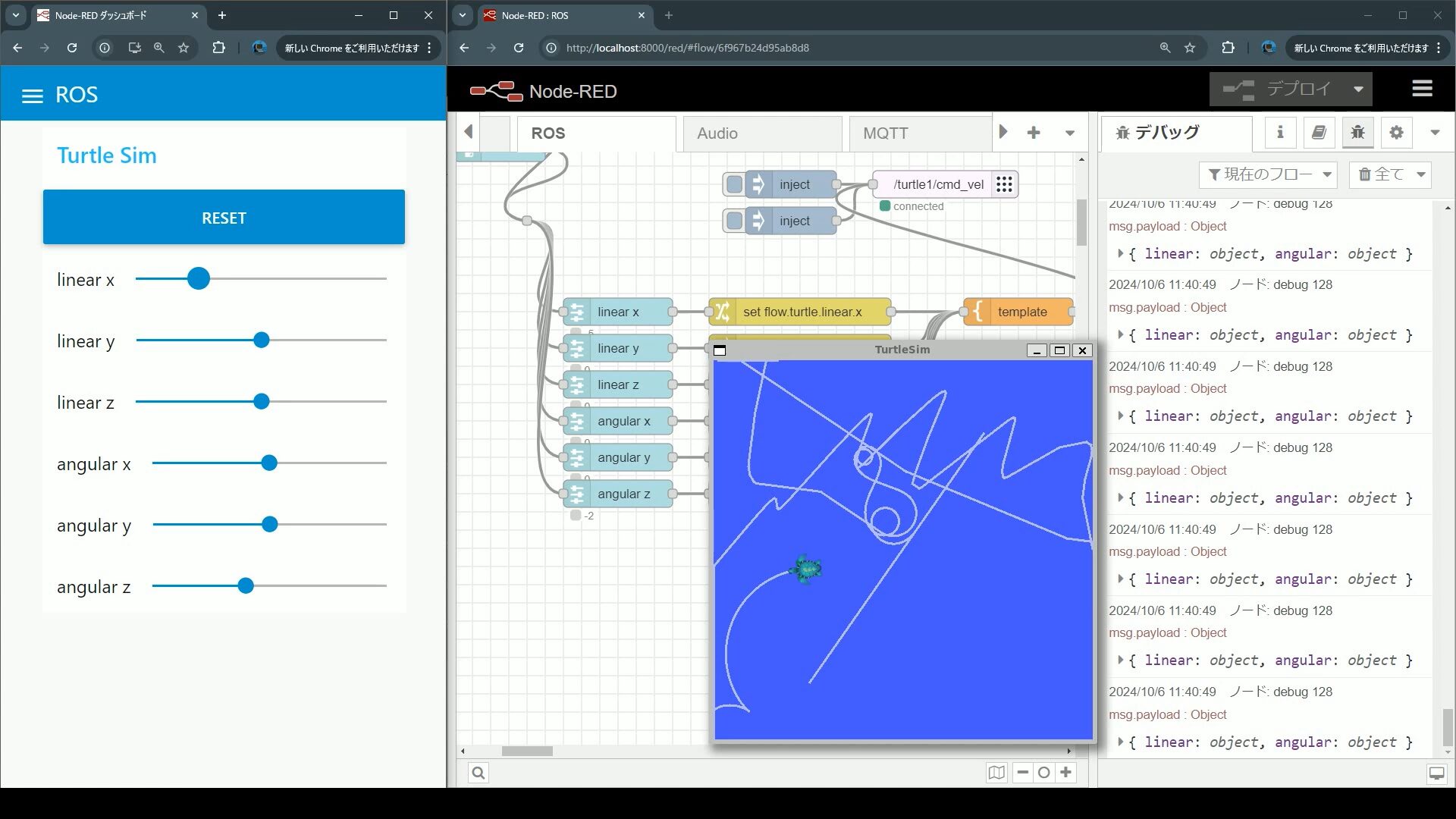
ROS1を使ってみる その1(Turtlesim、Node-RED)
はじめに 今回はROSをちゃんと学びたいということで、Turtlesimで通信周りの確認をしてみました。 これまでTurtlesimのカメをキーボードやGUIで操作したことはありますが、改めて試しています。また、No […]