
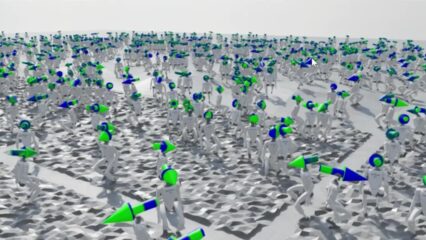
NVIDIA Isaac Labを試してみる その3(ヒューマノイドの歩行に関する強化学習のサンプル実行、Unitree G1)
はじめに 今回はIsaac Labでヒューマノイドの歩行に関するサンプルを実行してみました。 ヒューマノイドについてニュースでもよく見かけるようになりましたが、実機に触れる機会は無いので、せめてシミュレーションだけで […]

NVIDIA Isaac Labを試してみる その2(強化学習のサンプル実行、Cartpole、Franka)
はじめに 今回はIsaac Labの強化学習のサンプルを2つ試してみました。 強化学習自体はGymnasiumなどでも過去に試していましたが、Isaac Labの場合は3D空間で複数個配置して学習が行われるので面白い […]
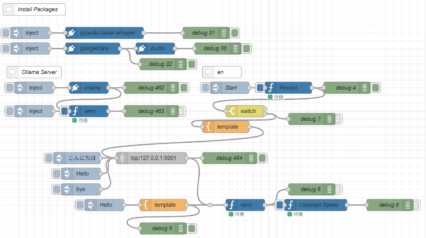
英会話練習のためのプログラムを作成してみる その1(Node-RED、Python)
はじめに つい最近、国際学会に参加することがありました。英語の発表をするだけなら練習すればいいのですが、質疑応答は即座に英語で回答できるか不安だったので、英会話練習のためのプログラムを作成してみました。 これまで試し […]
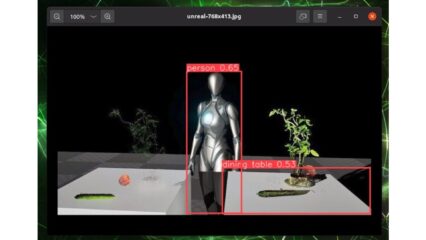
Jetson Xavierを使ってみる その6(YOLO、CUDAのバージョン切り替え、GPUでの処理)
はじめに 今回はJetson XavierでYOLOを用いた物体検出を試してみました。 Jetson XavierはGPUの性能が高いので、GPUを利用して実行できるように環境を構築しました。OSが古かったり、アーキ […]
Node-REDをアプリケーションに組み込む その2(フォルダごとにインストール)
はじめに 今回はNode-REDの環境をフォルダに切り分けてインストールできないか試してみました。 以前の記事ではElectronと組み合わせて試していたのですが、要はExpressで起動しているだけだったので、フォ […]

YDLIDAR X4 Proを使ってみる その2(ミニPC、Linuxでの動作確認)
はじめに 今回はLinux環境でYDLIDAR X4 Proの動作確認を行いました。 前回はWindows環境でしたが、ロボットに搭載するPCがLinux環境のミニPCなので、その環境での動作確認です。 ▼Windo […]

WordPressにポチップを導入する(Amazonアフィリエイト)
はじめに AmazonアフィリエイトのAPIがCreators APIに移行して、このサイトでこれまで使っていたプラグインが利用できなくなってしまいました。今回はその対応に関する話です。 新しくプラグインを導入したの […]

YDLIDAR X4 Proを使ってみる その1(Windows、GUIアプリでの動作確認)
はじめに 今回はLiDARを購入したので、動作確認を行ってみました。 LiDARは他の安価なセンサーに比べると高額で、搭載できるロボットがなかったので触っていなかったのですが、設計中の移動ロボットに搭載できそうだった […]

USB接続で利用できるWi-Fi無線LAN子機を使ってみる
はじめに 今回はUSB接続で利用できるWi-Fi無線LAN子機を購入したので、参考程度の簡易的なものですが、通信速度を比較してみました。 最近WindowsのPCでWi-FiやBluetoothの調子が悪くて、スリー […]
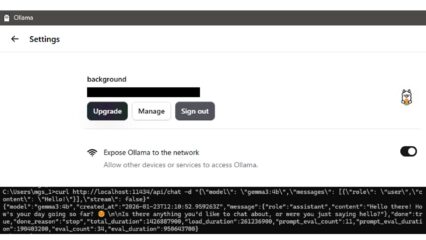
Ollamaを使ってみる その7(Tailscaleを利用したインターネット経由の通信)
はじめに 今回はAPIやVPN接続を利用して、Ollamaを使ってみました。 私が普段使っているノートPCでは大きなLLMだと処理が重いのですが、インターネットを経由して、デスクトップPCのOllamaで処理を行うよ […]

CTFの勉強 その1(Virtual BoxでのKali Linuxのインストールと環境構築、OpenVPN)
はじめに 今回はCTFの勉強するにあたって、Kali Linuxの環境を構築して、OpenVPNでの接続や設定などを行ってみました。 近いうちにCTFに参加しようと思っているので、付け焼刃ではありますが勉強中です。 […]
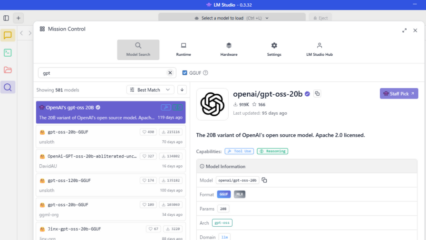
LM Studioを使ってみる その1(インストール、ローカルLLMとの会話)
はじめに 今回はローカルLLMを利用できる、LM Studioを使ってみました。 NVIDIAドライバーの更新のときに新着情報を眺めていたら見つけました。 ▼以下の記事でもOllamaとともに触れられています。 NV […]
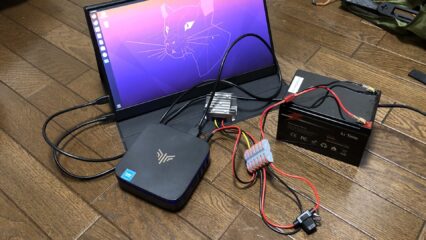
リン酸鉄リチウムイオンバッテリーを使ってみる その2(ミニPCへの電源供給、LiTime 12V12Ah LiFePO4)
はじめに 今回は以前購入したリン酸鉄リチウムイオンバッテリーを使って、ミニPCへの電源供給ができないか試してみました。 普段はACアダプタでDC12Vに変換して供給しているわけですが、バッテリーで供給できれば移動する […]
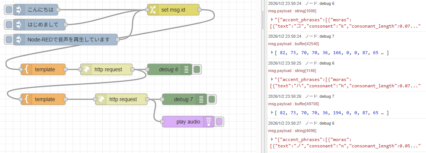
Node-REDを使ってみる その7(VOICEVOXエンジン、日本語の音声合成)
はじめに 今回はNode-REDでVOICEVOXエンジンのAPIを利用してみました。 以前VOICEVOX COREを用いた音声合成については試したことがあります。 ▼こちらの記事で試していました。 VOICEV […]

NVIDIA Isaac Labを試してみる その1(環境構築、Windows 11)
はじめに 今回はNVIDIAのIsaac Labの環境構築と起動について試してみました。 Isaac Labはデジタルツインの研究や企業の展示で見聞きしていたのですが、特にGPUの要求スペックが高いので触れてはいませ […]
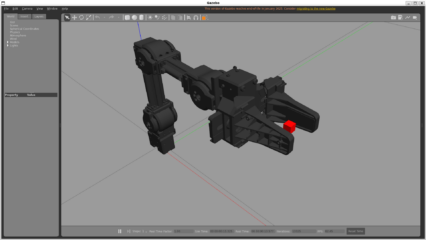
ROS2を使ってみる その4(OpenManipulatorのシミュレーション、WSL2 Ubuntu 22.04)
はじめに 今回はROS2でOpenManipulatorのシミュレーションを実行してみました。 WSL2で新しくROS2の環境を構築しましたが、具体的なロボットのシミュレーションは行っていなかったので、改めて動作確認 […]
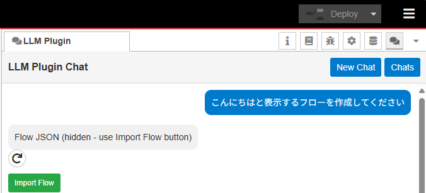
Node-REDのプラグインを開発してみる その1(LLM Plugin、Ollama、OpenAI)
はじめに 今回はNode-REDのプラグインを開発してみました。 Node-REDのプラグインに関する情報が少なすぎて、プラグインと言っていいのか分からないのですが、Node-RED MCUでもプラグインという名前が […]

OpenAIのAPIキーを利用してみる その1(APIキーの発行)
はじめに 今回はOpenAIのAPIキーを利用してみました。 以前からAPIキーはお金がかかるので使わずに、ローカルLLMを利用してきました。しかし私のノートPCでは処理速度に限界を感じるようになってきたので、ロボッ […]

2025年趣味的やっちまった集
はじめに 2025年も最後になりました。今年も管理人こと私の振り返りと反省をお届けします。 今年は卒論を書いて学部を卒業し、大学院に入学し、論文を書いたり学会で発表したりと、研究の方が忙しくなってきました。それと並行 […]

micro:bitを使ってみる その2(Make Codeでの開発、サーボモータの制御)
はじめに 今回はmicro:bitを使って、サーボモータの制御を試してみました。 まずはサーボモータ1個のブロックでの制御について確認です。数を増やせば、ロボットアームの制御もできるかと思います。 ▼以前の記事はこち […]

ROS2を使ってみる その3(環境構築、WSL2 Ubuntu 22.04)
はじめに 最近WSL2でUbuntu環境を複数インストールできるようになったので、ROS2の環境を改めて構築してみました。 大学の研究でロボットの遠隔操作にも取り組み始めているのですが、通信周りを改善させるにはROS […]

GAMMAを使ってみる(AIでプレゼンテーション生成)
はじめに 今回はAIでプレゼンテーションを生成できる、GAMMAを利用してみました。 最近はAI系のツールやソフトウェアが色々ありますが、その中でもGAMMAはプレゼンテーションやドキュメントなどの生成が得意なようで […]

リチャージWiFiを使ってみる(買い切り型のモバイルWiFi、Raspberry Piとの接続)
はじめに 今回はリチャージWiFiというモバイルWiFiを試してみました。 元々は出張先でロボットの遠隔操作をするのにポケットWiFiやレンタルサービスを調べていたのですが、買い切り型でチャージも可能なものとして見つ […]

Node-RED Con Nagoya 2025に登壇しました!
はじめに 今回は10/17に行われたNode-RED Con Nagoya 2025の振り返りです。1年に1回行われている、Node-REDのカンファレンスにはじめて登壇しました。 これまでNode-REDのノードを […]

WordPressを使ってみる その1(WSL2 Ubuntu 22.04環境へのインストール)
はじめに 今回はWordPressをWSL2 Ubuntu 22.04環境にインストールしてみました。 このサイトは3年半ほどWordPressで運営しているのですが、書籍に従って設定していたというのもあり、そろそろ […]

HunyuanWorldを試してみる その1(HunyuanWorld-1.0、環境構築、パノラマ画像の生成)
はじめに 今回はAIで3D空間を生成できるという、HunyuanWorld-1.0を試してみました。 環境構築はできたものの、私のノートPCでは処理が相当重そうだったので、パノラマ画像の生成まで試してみました。3D空 […]

Jetson Xavierを使ってみる その5(NoMachine、リモートデスクトップ接続)
はじめに 今回はNoMachineを利用して、PCからJetson Xavierへのリモートデスクトップ接続を試してみました。 これまでもリモートデスクトップ接続は色々試していたのですが、今回はヘッドレス運用している […]

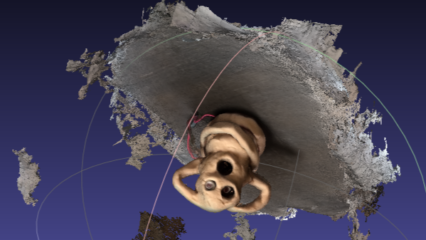
3DプリンターでQRコードを出力する(GS2Meshでメッシュ化したモデルに追加)
はじめに 今回は以前GS2Meshを用いて出力したハニワの3Dモデルに、QRコードを追加してみました。 3DプリンターでQRコードを出力している方が身近にも何名かいらっしゃって、そんなに精度よく出力できるのかと驚いて […]
3D Gaussian Splattingを使ってみる その5(GS2Meshの環境構築、WSL2 Ubuntu 22.04)
はじめに 今回は改めてGS2Meshの環境を構築してみました。 これまでの記事でWSL2のUbuntu 22.04を複数インストールできるようにして、CUDAのバージョンも切り替えできるようにしました。これを踏まえて […]
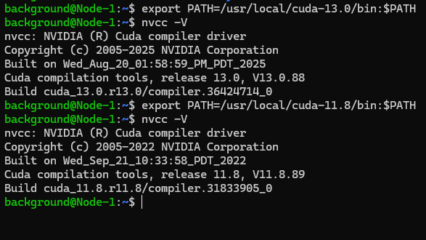
複数のCUDAのバージョンを切り替える(WSL2 Ubuntu 22.04)
はじめに 今回はWSL2 Ubuntu 22.04の環境で、CUDAのバージョンの切り替えについて試してみました。 以前3D Gaussian Splatting (3DGS) の環境を構築するために、元々入っていた […]