
ROS
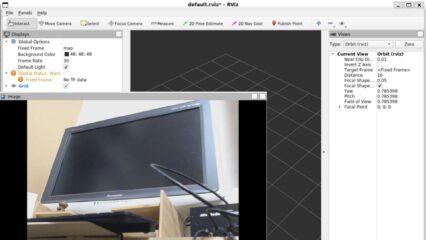
Trying Out Jetson Xavier Part 4 (Sending and Receiving Image Data using ROS and Tailscale)
Introduction In this post, I tried sending and receiving image data over the internet using ROS and Tailscale. […]
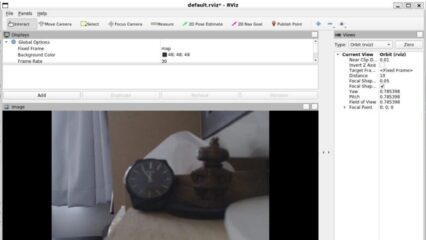
Trying Out Jetson Xavier Part 3 (ROS Environment Setup and Publishing USB Camera Video)
Introduction In this post, I set up a ROS environment on the Jetson Xavier and tried publishing video from a U […]
Using WSL2 Part 4 (Ubuntu 16.04, ROS Kinetic, Open Manipulator)
Introduction So far, I’ve installed Ubuntu 18.04, 20.04, and 22.04 on WSL2 and built ROS/ROS2 environments. Th […]

Trying Out WSL2 Part 3 (Ubuntu 20.04, ROS Noetic, Open Manipulator)
Introduction In this post, I tried installing ROS on Ubuntu 20.04 within WSL2.The environment I built last tim […]

Trying Out WSL2 Part 2 (Ubuntu 22.04, ROS2 Iron)
Introduction In a previous article, I built a ROS2 environment directly on Windows. Since then, I’ve tried to […]
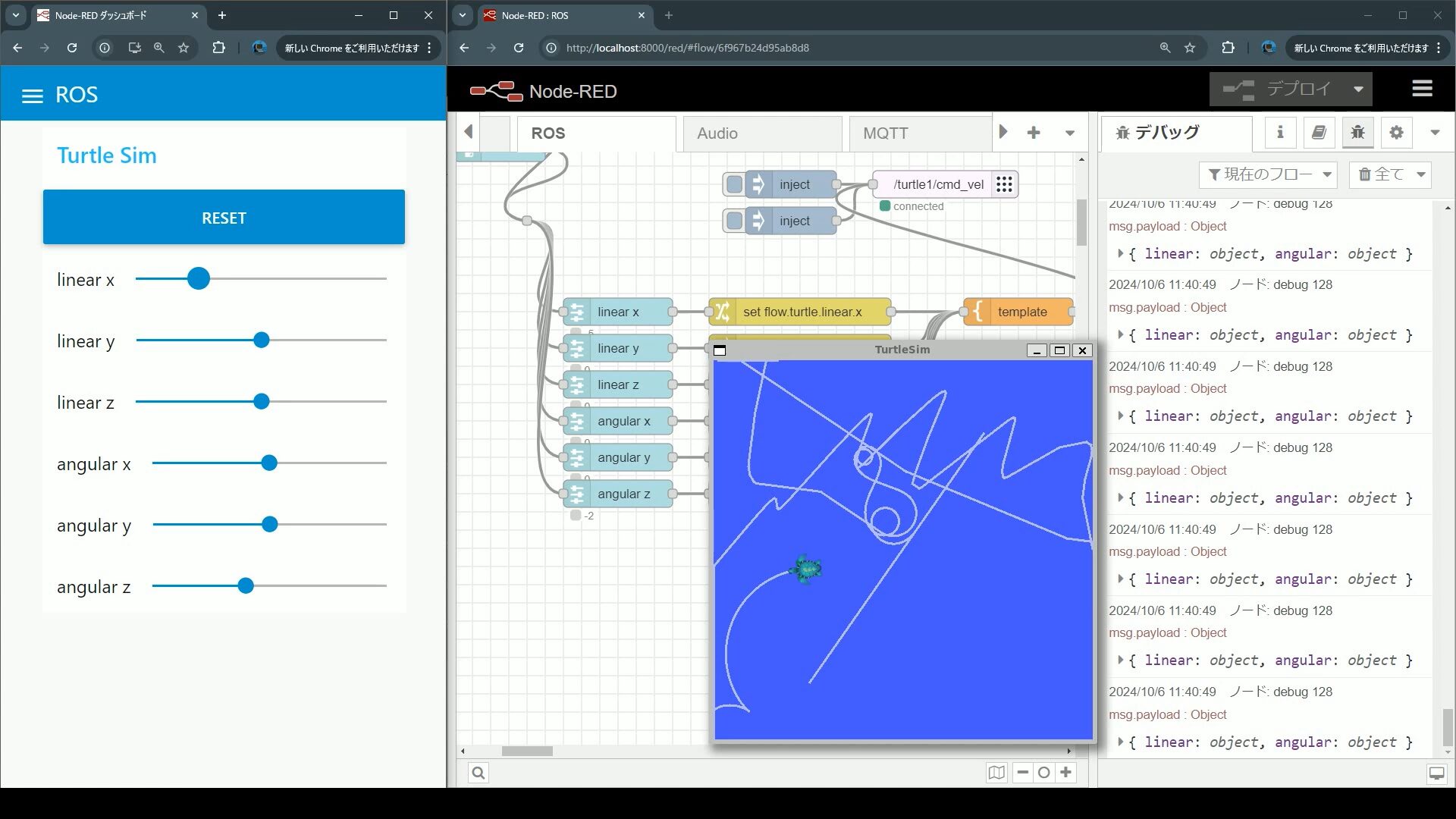
Trying Out ROS1 Part 1 (Turtlesim, Node-RED)
Introduction In this post, since I wanted to properly learn ROS, I checked the communication aspects using Tur […]

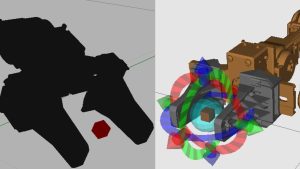
Trying Out Unity Part 2 (ROS#, Subscribing to Camera Images)
Introduction In this post, I installed ROS# in Unity and enabled subscribing to camera images being published […]

Object Detection with YOLO Part 3 (Integration with ROS, WSL2 Ubuntu 18.04)
Introduction In this post, I tried integrating YOLO with ROS on Ubuntu 18.04 via WSL2.This setup is commonly u […]
WebSocket Communication with ROS on WSL2 (ROS Bridge, Node-RED, Gazebo)
Introduction In this article, I used ROS Noetic and Node-RED with WSL2 for WebSocket communication. I wanted […]